1
2
3
4
t
t
UF
Vz4
t
UFVz3
t
UFVz2
t
UF
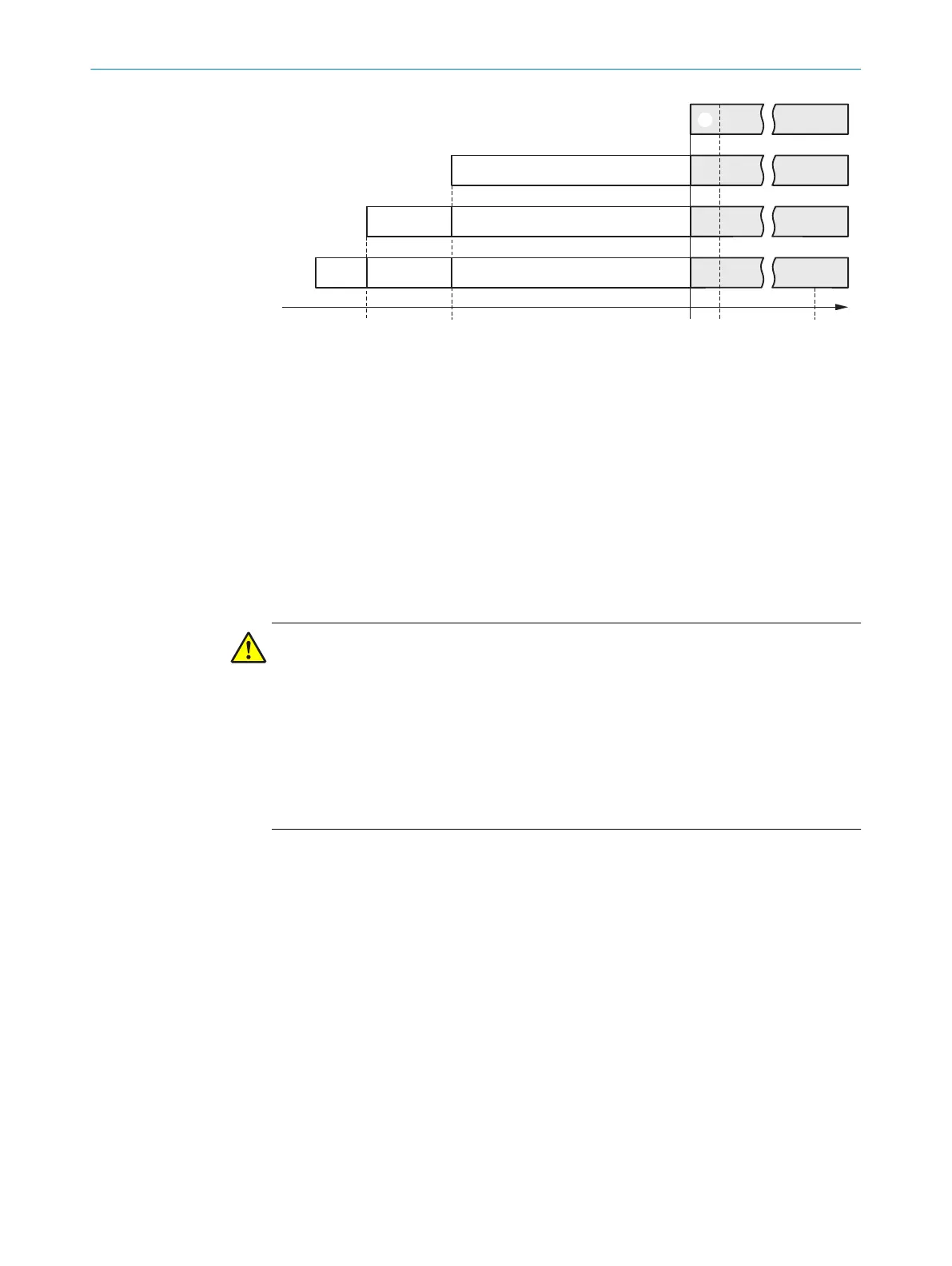
Figure 26: Advancing the switching time
•
If t
he input conditions are present at the control inputs within 10 ms (cf. 1), the
switching time (t
UF
) does not need to be advanced.
•
If an input delay for the control inputs needs to be allowed for (cf. 2), the switch‐
ing time (t
UFVz2
) must be advanced by the input delay.
•
If the inputs of another device are used via EFI, the switching time (t
UFVz3
) must be
advanced by an additional 0.5 times the basic response time of the slowest sys‐
tem in the EFI system (cf. 3).
•
If external OSSDs are used, the switching time (t
UFVz4
) must be advanced by an
additional 20 ms (cf. 4).
Important information
DANGER
Ineffectiveness of the protective device
Persons or parts of the body to be protected may not be recognized or not recognized in
time in case of non-observance.
Someone may already be in the protective field at the time of switchover. Only by switch‐
ing in the correct time frame, i.e., before the hazard occurs at this point for the person,
is protection provided.
b
Time the switching so that the safety laser scanner detects a person in the protec‐
tive field at a sufficient minimum distance before the dangerous state occurs.
Example
T
he following figure shows a gantry robot that is protected by 2 monitoring cases.
PROJECT PLANNING 4
8010948/ZA21/2020-06-18 | SICK O P E R A T I N G I N S T R U C T I O N S | S300
35
Subject to change without notice

 Loading...
Loading...










