iCNC Performance
6-10 iHC Manual 0-5401
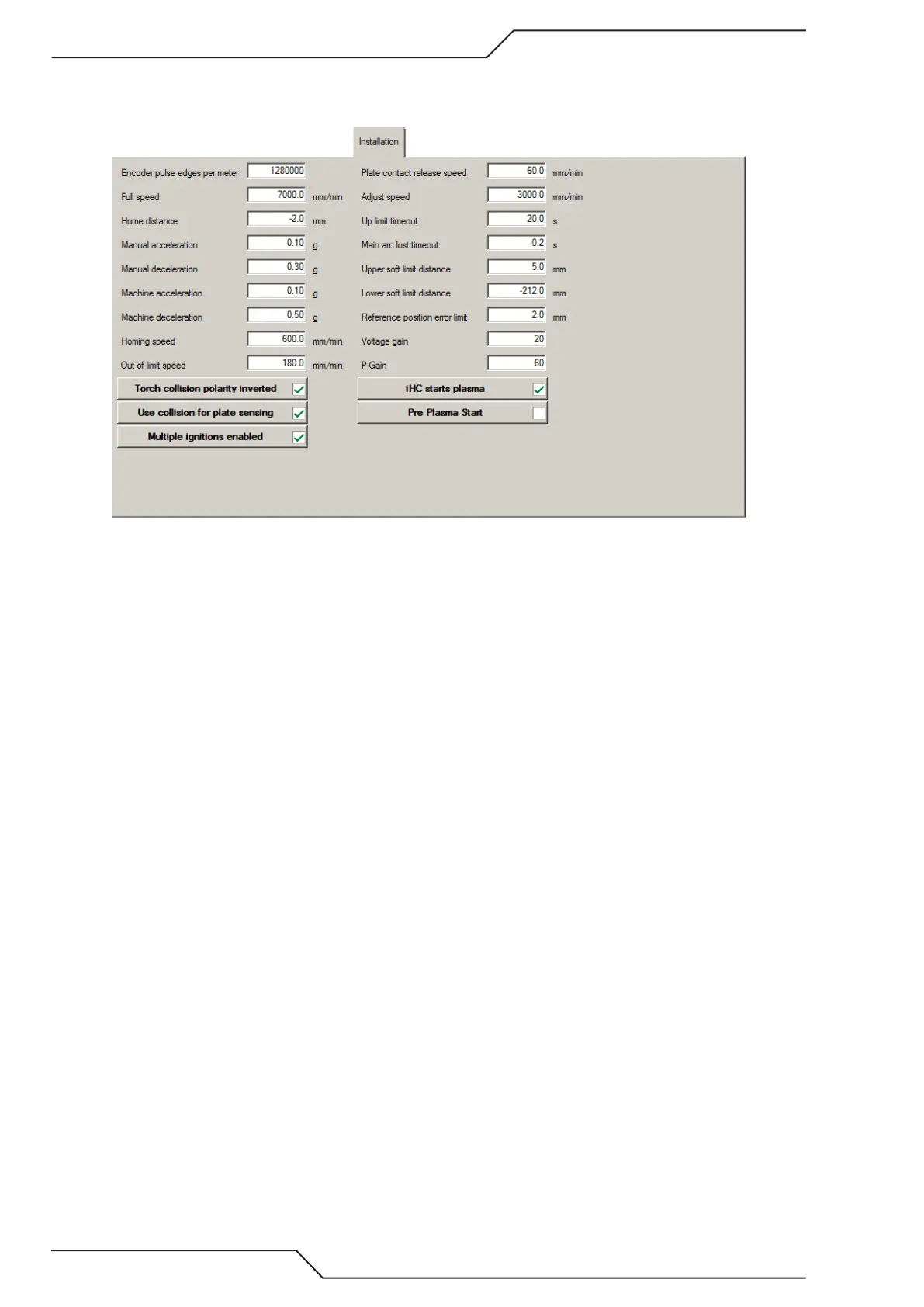
6.7.4 Installation Tab
These parameters are password protected. Some parameters are the same as on the Advanced Tab.
• Encoder pulse edges per meter Determined by the type of encoder and the threaded shaft of the lifter.*
• Full Speed The maximum speed of the lifter. Full Speed is used above Slow Down Height.
• Home Distance The distance of the home position from the limit switch.
• Manual Acceleration & Manual Deceleration Used on jog, when AVC is on.
• Machine Acceleration & Machine Deceleration Used when the software drives the lifter.
• Homing Speed The speed used in the homing process.
• Out Of Limit Speed The speed used when the torch is moving out of limit switch.
• Plate Contact Release Speed The speed used when driving out of plate until contact is released.
• Adjust Speed Used in arc-voltage control process to determine the maximum control speed of the lifter
• Up Limit Timeout When moving up, the torch halts after this timeout if the limit switch is not found.
• Main Arc Lost Timeout Typically 0.1s to avoid losing the cut without real cause.
• Hold OFF AVC Delay Additional delay after Hold OFF which can be useful after piercing and in corners.
• Upper Soft Limit Distance Upper soft limit which is located above the limit switch. The position of the upper soft limit
is determined by adding the Upper Soft Limit Distance to the position of the limit switch.
• Lower Soft Limit Distance Lower soft limit which is located below the plate. The position of the lower soft limit is deter-
mined by subtracting the Lower Soft Limit Distance from the position of the limit switch. Lower soft limit is supposed
to be determined so that short motion below table surface is allowed but limiting the lifter from hitting the hard stop
of the lifter.
• Reference Position Error Limit If there is a cumulative error in the position of the limit switch, the Reference Position
Error Limit determines how large of an error can be tolerated. If the Reference Position Error Limit is exceeded, the
torch performs homing
• Voltage Gain Determines how much force the system uses to correct the difference between the actual voltage and
the target voltage.
• P-Gain Used to tune the movement. Too large of a value can cause the lifter to oscillate and too small of a value makes
the movement soft and inaccurate.
• I-Gain Used to fine-tune the movement of the lifter.
• Torch collision polarity inverted Select NC or NO use of a collision sensor.
* Encoder value is calculated by: 6400000 / lifter screw rise in mm
Example lifter screw is 5 mm rise per 1 motor rotation
6400000 / 5 mm = 128 0000
Encoder value = 1280000