8-36 Trio BASIC Commands
Motion and Axis Commands
Trio Motion Technology
MOVECIRC
Syntax:
MOVECIRC(finish1, finish2, centre1, centre2, direction)
Type:
Motion Command.
Alternate Format:
MC()
Description:
Moves 2 orthogonal axes in such a way as to produce a circular arc at the tool point.
The length and radius of the arc are defined by the five parameters in the command
line. The move parameters are always incremental from the end of the last speci-
fied move. This is the start position on the circle circumference. Axis 1 is the cur-
rent
BASE
axis. Axis 2 is the following axis in the
BASE
array. The first 4 distance
parameters are scaled according to the current unit conversion factor for each axis.
Parameters:
Note:
In order for the
MOVECIRC()
command to be correctly executed, the two axes gen-
erating the circular arc must have the same number of encoder pulses/linear axis
distance. If this is not the case it is possible to adjust the encoder scales in many
cases by adjusting with
PP_STEP
.
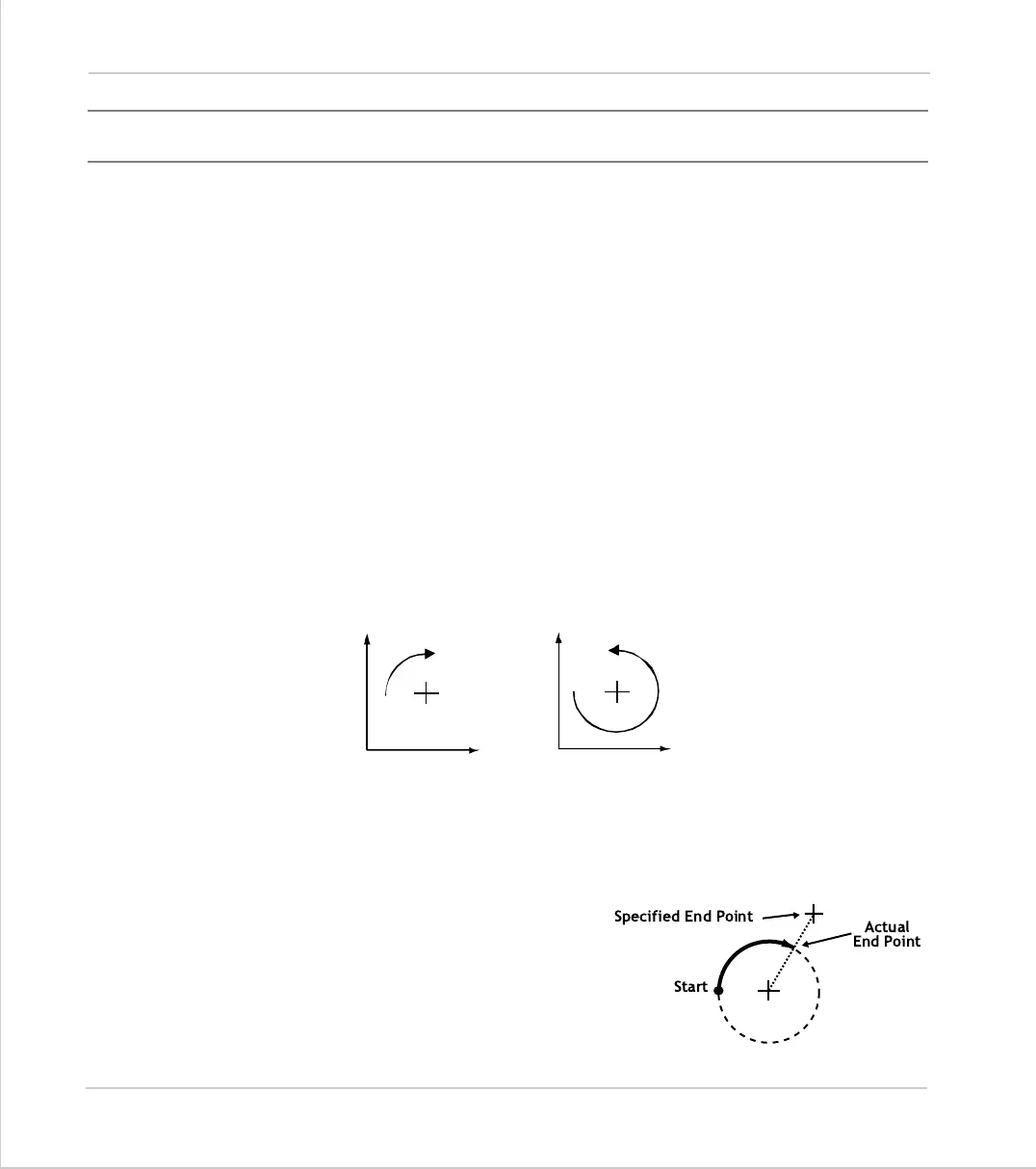
Note2:
If the end point specified is not on the cir-
cular arc. The arc will end at the angle
specified by a line between the centre and
the end point.
finish1:
position on BASE axis to finish at.
finish2:
position on next axis in BASE array to finish at.
centre1:
position on BASE about which to move.
centre2:
position on next axis in BASE array about which to move.
direction:
The “direction” is a software switch which determines whether
the arc is interpolated in a clockwise or anti- clockwise direction.
2
1
Direction=0
2
1
Direction=1