Motion Coordinator Technical Reference Manual
Trio BASIC Commands 8-37
Motion and Axis Commands
Example:
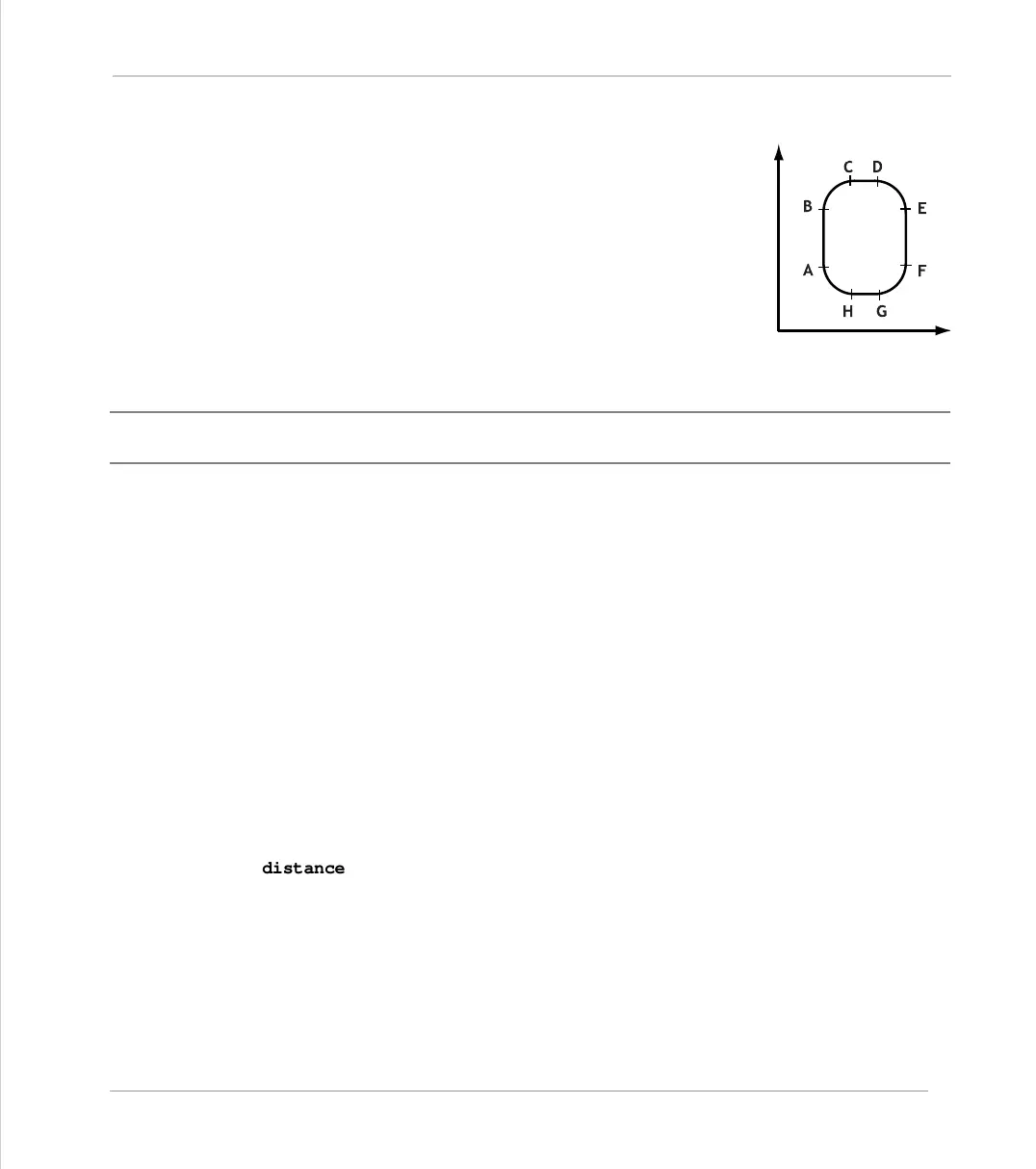
The command sequence to plot the letter ‘0’ might be:
MOVE(0,6)' move A -> B
MOVECIRC(3,3,3,0,1)' move B -> C
MOVE(2,0)' move C -> D
MOVECIRC(3,-3,0,-3,1)' move D -> E
MOVE(O,-6)' move E -> F
MOVECIRC(-3,-3,-3,0,1)' move F -> G
MOVE(-2,0)' move G -> H
MOVECIRC(-3,3,0,3,1)' move H -> A
MOVELINK
Syntax:
MOVELINK (distance, link dist, link acc, link dec, link axis[,
link options] [, link start]).
Type:
Motion Command.
Alternate Format:
ML()
Description:
The linked move command is designed for controlling movements such as:
• Synchronization to conveyors
•Flying shears
• Thread chasing, tapping etc.
•Coil winding
The motion consists of a linear movement with separately variable acceleration and
deceleration phases linked via a software gearbox to the MEASURED position (
MPOS
)
of another axis.
Parameters:
)
*
+,
-
.
/0
distance:
incremental distance in user units to be moved on the current
base axis, as a result of the measured movement on the
“input” axis which drives the move.
link dist:
positive incremental distance in user units which is required to
be measured on the “link” axis to result in the motion on the
base axis.
link acc:
positive incremental distance in user units on the input axis
over which the base axis accelerates.