Motion Coordinator Technical Reference Manual
Fibre-Optic Network 11-9
Network Programming
read_key:
GET #3,k
IF k>9 THEN GOTO not_num
a=a*10+k
IF a>9999 THEN a=0
PRINT #10,CHR(27);CHR(72);CHR(7);a[6,0]
PRINT #11,CHR(27);CHR(72);CHR(7);a[6,0]
not_num:
IF (k=10)&(VR(length)<10000) THEN VR(length)=VR(length)+0.1
IF (k=11)&(VR(length)>0.1) THEN VR(length)=VR(length)-0.1
PRINT #10,CURSOR(28);VR(length)[8,1]
PRINT #11,CURSOR(28);VR(length)[8,1]
RETURN
do_motion:
' Main motion routine
Example 2
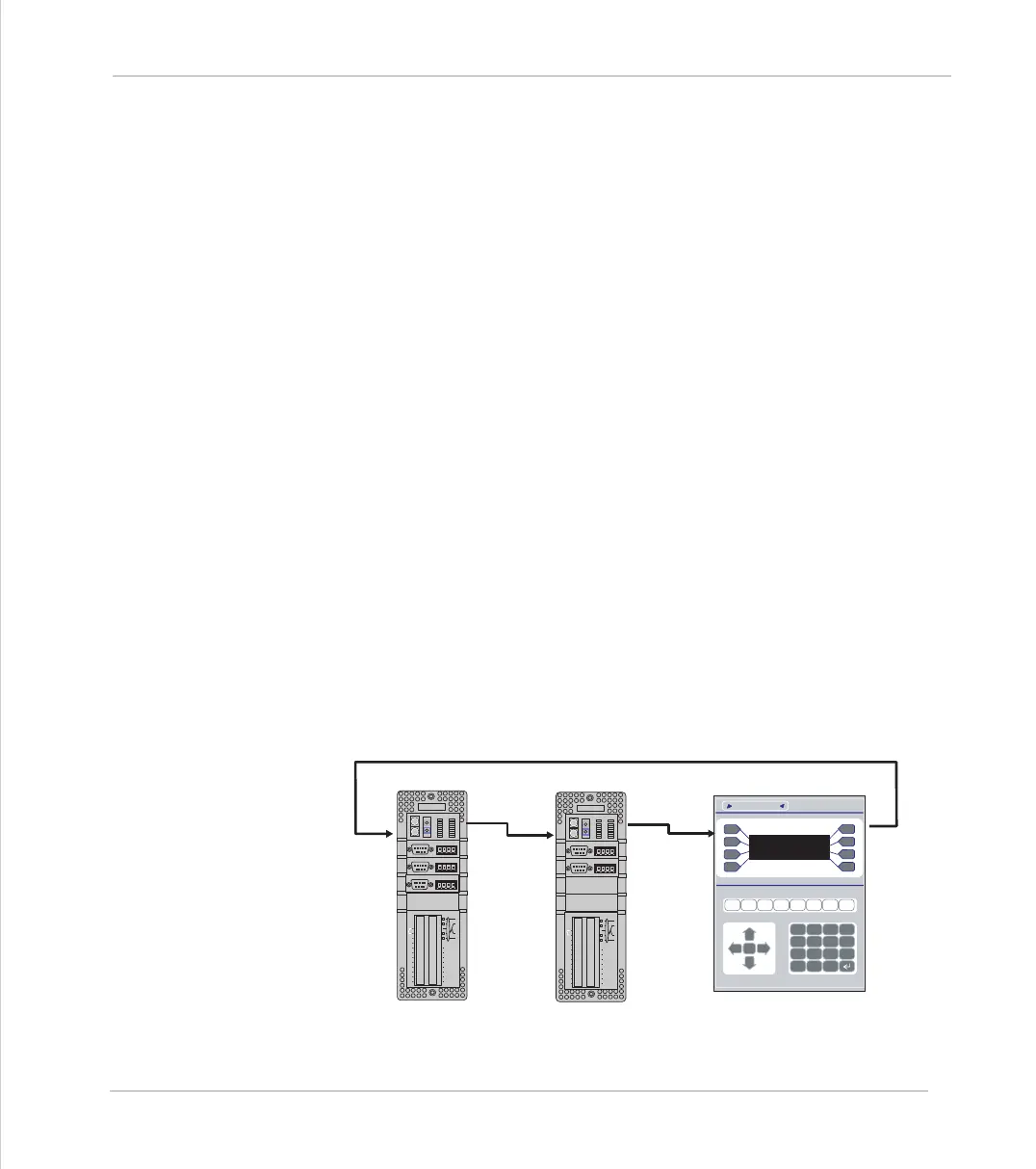
Consider a five axis machine with one membrane keypad. The axes can be
divided into two distinct blocks. Two axes are concerned with the feeding of the
material and the other three with the cutting and packing of the material.
This could also be achieved with an MC206 or an MC216 + Axis expander, but in
this example because each block can be built as a stand-alone unit, each requires
it’s own Motion Coordinator. In this example our system uses two MC216 control-
lers.
Our network will consist of the two Motion Coordinators and the membrane key-
pad. It should be connected as shown in below.
Network Example 2
ENCODER
V+ V- R
0v
5 4 3 2 1
9 8 7 6
ENCODER
V+ V- R
0v
5 4 3 2 1
9 8 7 6
IO8
IO9
IO10
IO11
IO12
IO13
IO14
IO15
I 0
I 1
I 2
I 3
I 4
I 5
I 6
I 7
24v
0v
Trio
8
9
10
11
12
13
14
15
0
OKNET
0
1
STATUS
1
2
3
4
5
6
7
7
4
1
-
8
5
2
0
9
6
3
.
Y
N
CLR
Trio Motion Technology
ENCODER
V+ V- R
0v
5 4 3 2 1
9 8 7 6
ENCODER
V+ V- R
0v
5 4 3 2 1
9 8 7 6
IO8
IO9
IO10
IO11
IO12
IO13
IO14
IO15
I 0
I 1
I 2
I 3
I 4
I 5
I 6
I 7
24v
0v
Trio
8
9
10
11
12
13
14
15
0
OKNET
0
1
STATUS
1
2
3
4
5
6
7
R
R
R
T
T
T
ENCODER
V+ V- R
0v
5 4 3 2 1
9 8 7 6