11.2 Parameter Recording Table
11-30
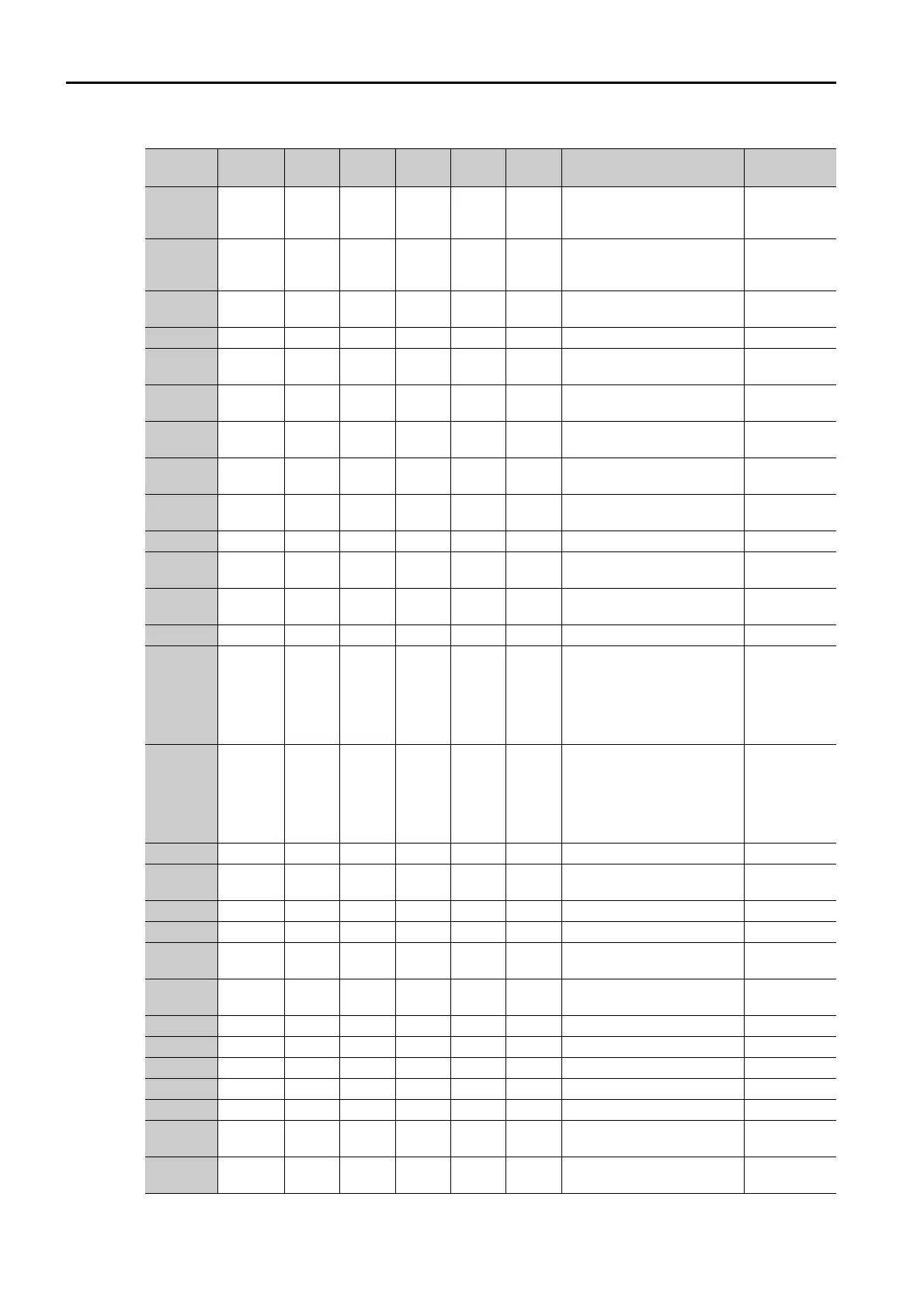
Pn526 25600
Position Deviation Over-
flow Alarm Level at SERVO
ON
Immediately
Pn528 100
Position Deviation Over-
flow Warning Level at
SERVO ON
Immediately
Pn529 10000
Speed Limit Level at
SERVO ON
Immediately
Pn52B 20 Overload Warning Level Immediately
Pn52C 100
Base Current Derating at
Motor Overload Detection
After restart
Pn530 0000h
Program Jog Operation-
Related Selections
Immediately
Pn531 1024
Program Jog Travel Dis-
tance
Immediately
Pn533 500
Program Jog Movement
Speed
Immediately
Pn534 100
Program Jog Acceleration/
Deceleration Time
Immediately
Pn535 100 Program Jog Waiting Time Immediately
Pn536 1
Program Jog Number of
Movements
Immediately
Pn560 400
Residual Vibration Detec-
tion Width
Immediately
PnB20 0 Movement Method After restart
PnB21
+99999999
Linear coordinates (PnB20
= 0): Forward Software
Limit (P-LS)
Rotational coordinates
(PnB20 ≠ 0): Last Rota-
tional Coordinate
After restart
PnB23
-99999999
Linear coordinates (PnB20
= 0): Reverse Software
Limit (N-LS)
Rotational coordinates
(PnB20 ≠ 0): First Rota-
tional Coordinate
After restart
PnB25 0 Home Position After restart
PnB27 2000
Reserved parameter
(Do not change.)
After restart
PnB29 500000 Acceleration Rate Immediately
PnB2B 500000 Deceleration Rate Immediately
PnB2D 10
Positioning Completed
Width (/INPOSITION Width)
Immediately
PnB2F 10
Near Signal Width (/NEAR
Width)
Immediately
PnB31 0 Homing Method After restart
PnB32 0 Homing Direction Immediately
PnB33 2000 Homing Movement Speed Immediately
PnB35 2000 Homing Approach Speed Immediately
PnB37 2000 Homing Creep Speed Immediately
PnB39 0
Final Travel Distance for
Homing
Immediately
PnB4F 0
Reserved parameter
(Do not change.)
After restart
Continued on next page.
Continued from previous page.
Parame-
ter No.
Default
Setting
Name
When
Enabled
 Loading...
Loading...






