5.3 Sequence I/O Signals
5.3.1 Input Signals
5-12
/S-ON (SERVO ON Input) Signal
This signal enables operation of the Servomotor.
Note: Use PnBAF = n.X (/S-ON (SERVO ON) Signal Allocation) to allocate the /S-ON signal to another con-
nector pin. Refer to the following section for details on input signal allocation.
5.3.3 Allocating Input Signals to Pins and Parameter Settings on page 5-18
/DEC (Homing Deceleration Switch Input) Signal
This is the home proximity signal that is used for homing. It is used to change the homing
speed.
Note: Allocate the /DEC signal to CN1-3 to CN1-9 or CN1-12. If you allocate it to any pin other than CN1-3 to CN1-
9 or CN1-12, an A.04A alarm (Parameter Setting Error 2) will occur.
Use PnBB2 = n.X (/DEC (Homing Deceleration Switch Input) Signal Allocation) to allocate the signal to
a connector pin.
Refer to the following section for details.
5.3.3 Allocating Input Signals to Pins and Parameter Settings on page 5-18
/ALM-RST (Alarm Reset Input) Signal
This signal functions as the alarm reset command.
Note: Use PnBB4 = n.X (/ALM-RST (Alarm Reset) Signal Allocation) to allocate the /ALM-RST signal to
another connector pin. Refer to the following section for details.
5.3.3 Allocating Input Signals to Pins and Parameter Settings on page 5-18
/P-CL (Forward External Torque Limit) Signal
This signal turns the forward external torque limit ON and OFF.
Note: You must allocate the /P-CL signal to use it. Use PnBB5 = n.X (/P-CL (Forward External Torque Limit
Input) Signal Allocation) to allocate the signal to a connector pin. Refer to the following section for details.
5.3.3 Allocating Input Signals to Pins and Parameter Settings on page 5-18
/N-CL (Reverse External Torque Limit) Signal
This signal turns the reverse external torque limit ON and OFF.
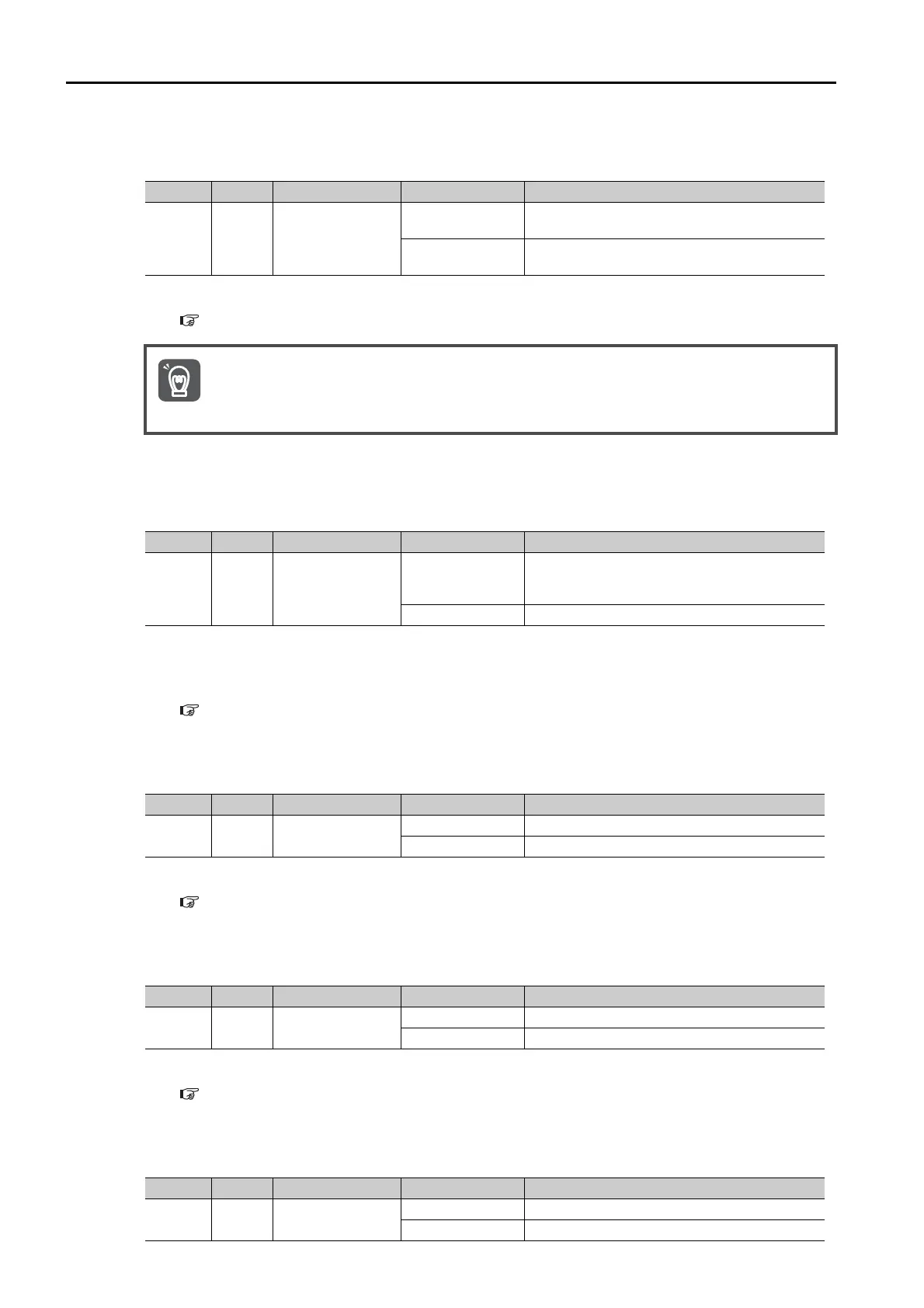
Type Signal Pin Signal Status Meaning
Input /S-ON 15 [default setting]
ON (closed)
Power is supplied to the Servomotor to enable
operation.
OFF (open)
Power supply to the Servomotor is stopped
and operation is disabled.
Input the /S-ON signal while the Servomotor is stopped. You cannot change to the SERVO ON
state while the Servomotor is operating.
Type Signal Pin Signal Status Meaning
Input /DEC Must be allocated.
ON (closed)
The homing speed is changed to the
approach speed or creep speed. The opera-
tion depends on the homing method.
OFF (open) The speed does not change.
Type Signal Pin Signal Status Meaning
Input
/ALM-
RST
8 [default setting]
ON (closed) Resets alarms.
OFF (open) Does not reset alarms.
Type Signal Pin Signal Status Meaning
Input /P-CL Must be allocated.
ON (closed) Enables the forward external torque limit.
OFF (open) Disables the forward external torque limit.
Type Signal Pin Signal Status Meaning
Input /N-CL Must be allocated.
ON (closed) Enables the reverse external torque limit.
OFF (open) Disables the reverse external torque limit.
Important
 Loading...
Loading...






