5.3 Sequence I/O Signals
5.3.2 Output Signals
5-15
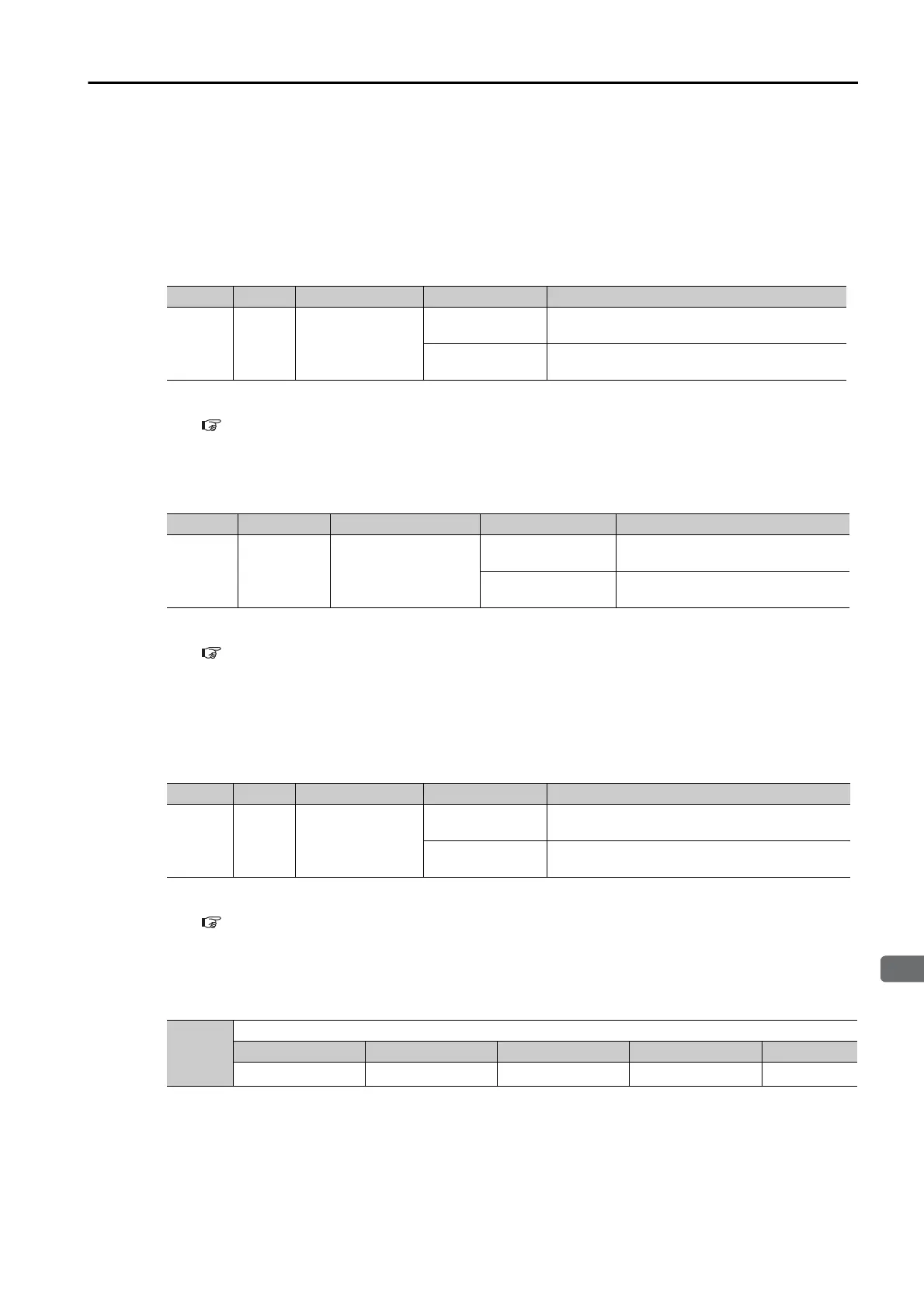
/S-RDY (Servo Ready Output) Signal
This signal indicates when the Servomotor is ready to receive the /S-ON (SERVO ON Input) sig-
nal.
The /S-RDY signal is turned ON under the following conditions.
• The power supply is ON.
• There are no alarms.
• Emergency stop status does not exist.
Note: You must allocate the /S-RDY signal to use it. Use PnBCB = n.X (/S-RDY (Servo Ready) Signal Alloca-
tion) to allocate the signal to a connector pin. Refer to the following section for details.
5.3.4 Allocating Output Signals to Pins and Parameter Settings on page 5-20
/CLT (Torque Limit Status Output) Signal
This signal indicates whether the motor output torque is being limited.
Note: You must allocate the /CLT signal to use it. Use PnBCC = n.X (/CLT (Torque Limit Status Output) Signal
Allocation) to allocate the signal to a connector pin. Refer to the following section for details.
5.3.4 Allocating Output Signals to Pins and Parameter Settings on page 5-20
/TGON (Rotation Detection Output) Signal
This signal indicates that the Servomotor is operating.
This signal is output when the Servomotor rotates at the setting of Pn502 (Rotation Detection
Level) or faster.
Note: You must allocate the /TGON signal to use it. Use PnBCD = n.X (/TGON (Rotation Detection Output)
Signal Allocation) to allocate the signal to a connector pin. Refer to the following section for details.
5.3.4 Allocating Output Signals to Pins and Parameter Settings on page 5-20
Setting the Rotation Detection Level
Use the following parameter to set the speed detection level at which to output the /TGON sig-
nal.
/NEAR (Near Output) Signal
This signal indicates when the motor position is close to the completion of positioning.
The host controller receives the /NEAR signal before it receives the /INPOSITION (Positioning
Completion) signal so it can start preparations for the operating sequence to use after position-
ing has been completed. This allows you to reduce the time required for operation when posi-
tioning is completed.
Typ e Signal Pin Signal Status Meaning
Output /S-RDY Must be allocated.
ON (closed)
Ready to receive the /S-ON (SERVO ON) sig-
nal.
OFF (open)
Not ready to receive the /S-ON (SERVO ON)
signal.
Typ e Signal Pin Signal Status Meaning
Output /CLT Must be allocated.
ON (closed)
The motor output torque is being
limited.
OFF (open)
The motor output torque is not
being limited.
Typ e Signal Pin Signal Status Meaning
Output /TGON Must be allocated.
ON (closed)
The Servomotor is operating at the setting of
Pn502 or faster.
OFF (open)
The Servomotor is operating at a speed that is
slower than the setting of Pn502.
Pn502
Rotation Detection Level
Setting Range Setting Unit Default Setting When Enabled Classification
1 to 10,000
1 min
-1
30 Immediately Setup
 Loading...
Loading...






