5.3 Sequence I/O Signals
5.3.2 Output Signals
5-16
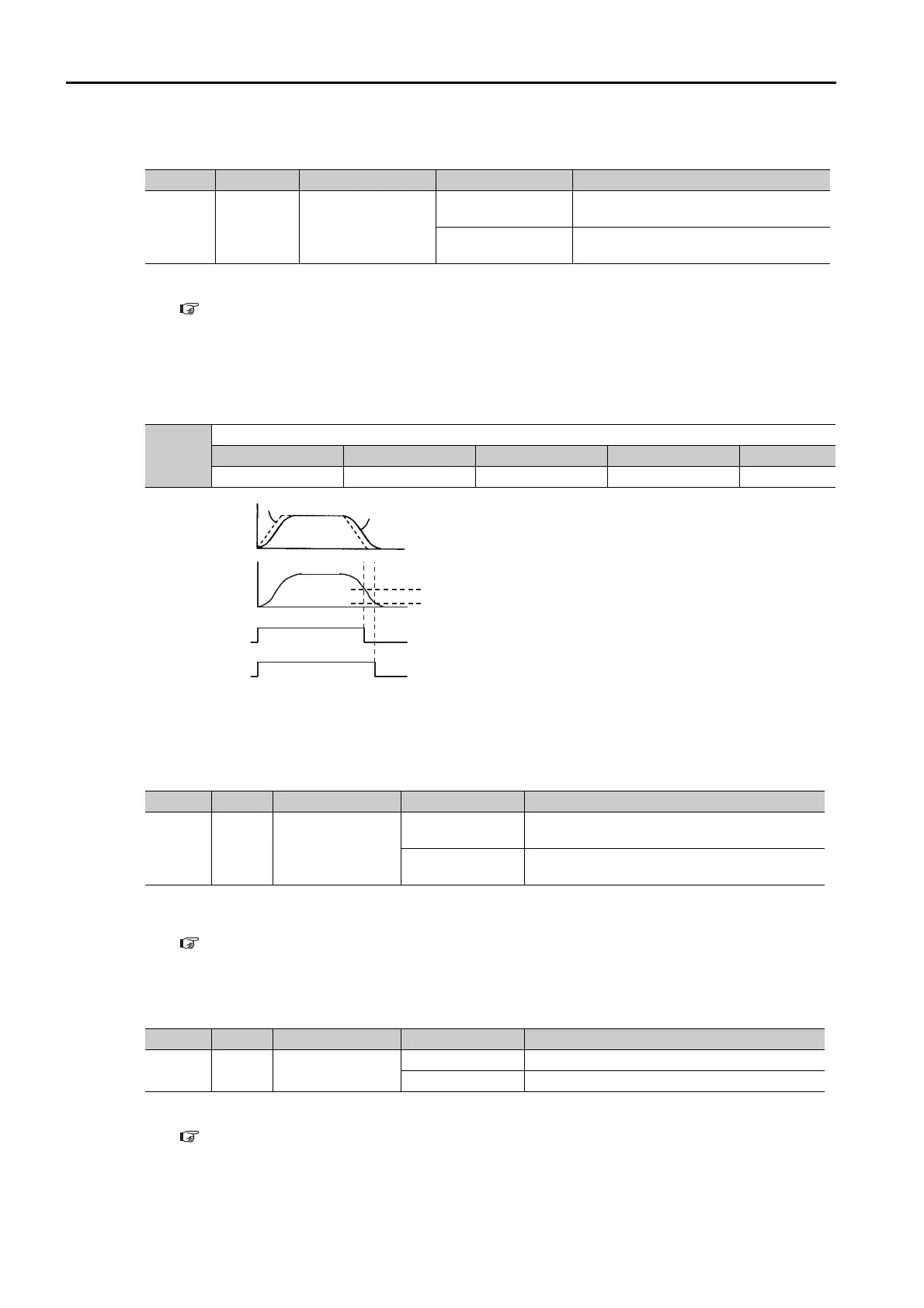
The NEAR signal is generally used in combination with the /INPOSITION (Positioning Comple-
tion Output) signal.
Note: You must allocate the /NEAR signal to use it. Use PnBCE = n.X (/NEAR (Near Output) Signal Allocation)
to allocate the signal to a connector pin. Refer to the following section for details.
5.3.4 Allocating Output Signals to Pins and Parameter Settings on page 5-20
Setting the Position Near Width
You set the condition for outputting the /NEAR (Near Output) signal in PnB2F (Near Width). The
/NEAR signal is output when the difference between the target position and current position is
equal to or less than the setting of PnB2F.
Note: Normally, set PnB2F to a value that is larger than the setting of PnB2D (Positioning Completed Width).
/V-CMP (Speed Coincidence Detection Output) Signal
This signal is output when the Servomotor speed is the same as the reference speed.
Note: You must allocate the /V-CMP signal to use it. Use PnBCF = n.X (/V-CMP (Speed Coincidence Detec-
tion Output) Signal Allocation) to allocate the signal to a connector pin. Refer to the following section for
details.
5.3.4 Allocating Output Signals to Pins and Parameter Settings on page 5-20
/POSRDY (Homing Completed Output) Signal
This signal is output when the position information becomes valid after homing is completed.
Note: Use PnBD2 = n.X (/POSRDY (Homing Completed Output) Signal Allocation) to allocate the /POSRDY
signal to another connector pin. Refer to the following section for details.
5.3.4 Allocating Output Signals to Pins and Parameter Settings on page 5-20
Typ e Signal Pin Signal Status Meaning
Output /NEAR Must be allocated.
ON (closed)
The Servomotor has reached a point
near to positioning completion.
OFF (open)
The Servomotor has not reached a
point near to positioning completion.
PnB2F
Near Width
Setting Range Setting Unit Default Setting When Enabled Classification
1 to 99,999 Reference units 10 Immediately Setup
Type Signal Pin Signal Status Meaning
Output /V-CMP Must be allocated.
ON (closed)
The Servomotor speed is the same as the ref-
erence speed.
OFF (open)
The Servomotor speed is not the same as the
reference speed.
Type Signal Pin Signal Status Meaning
Output
/POSRDY
28 [default setting]
ON (closed) The position information is valid.
OFF (open) The position information is not yet valid.
Speed
Position deviation
Reference Speed
Motor speed
/NEAR signal
/INPOSITION signal
PnB2D
PnB2F
 Loading...
Loading...






