Kinco FD5P AC series servo
driver
User Manual
Chapter 9 List of FD5P motor controller parameters
User Manual
The F002 Group panel menu contains the parameters that the control ring needs to set.
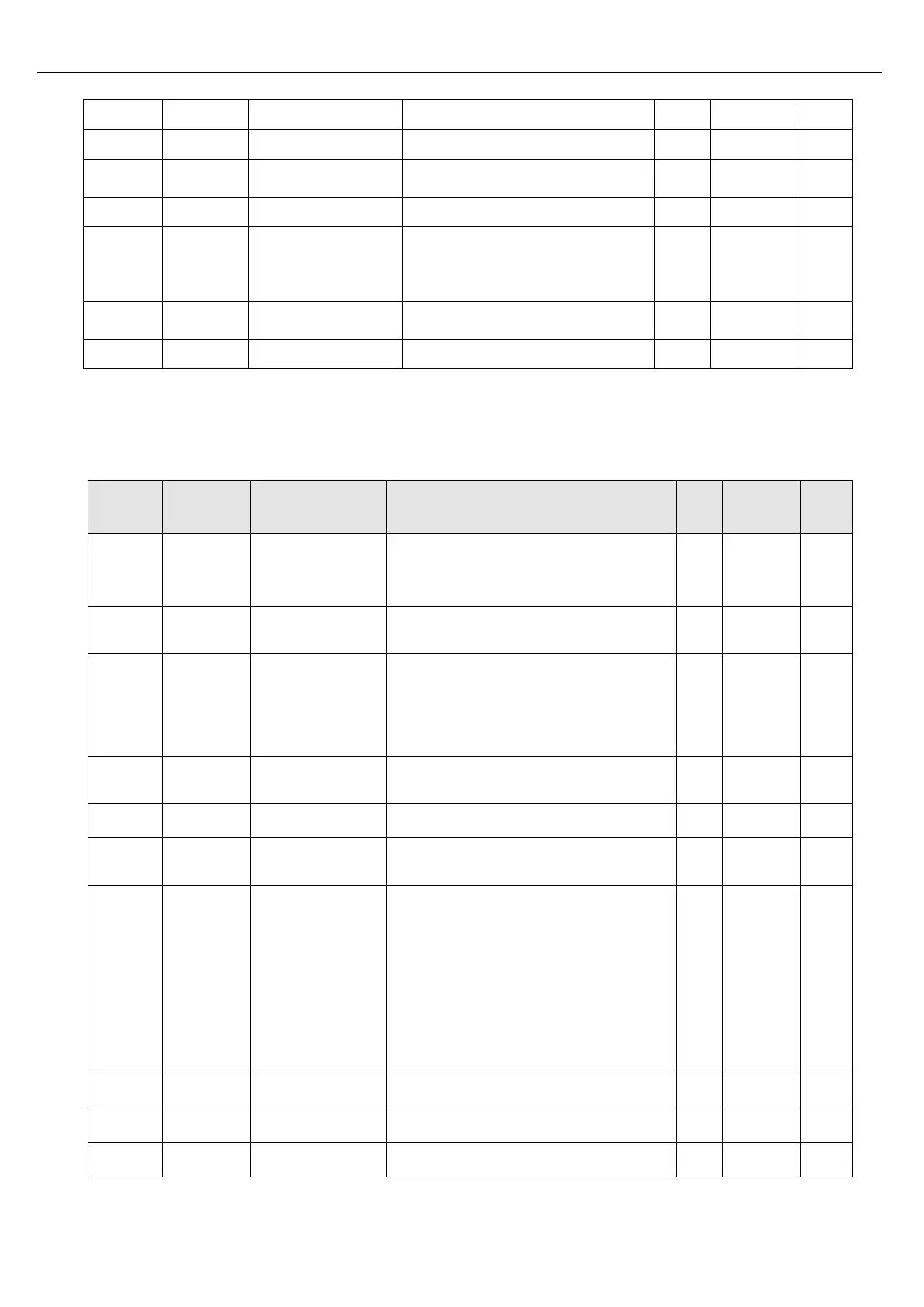
Table 9-5 F002 parameters
Real speed, unit: 0.01rpm
Real current in q axis, unit 0.1Arms
warning status word of the encoder
Bit 0: Battery Warning
Bit 1: Mixed Warning
Bit 2: Encoder Busy
Range: 0-31, current index in the position
table
Incremental encoder ABZ signal loss count
Save or init parameters
1: save control parameters
10: init control parameters
Bandwidth of the velocity loop,
unit: Hz.
Integral gain of the velocity loop, as acombination
of 32*Kvi(60F9.02) + Kvi/32(60F9.07). When
written, it setsKvi(60F9.02)=0 and the value goes
toKvi/32(60F9.07).
Notch filter frequency BW=Notch_N*10+100[Hz]
Bandwidth of velocity feedback filter
BW=Speed_Fb_N*20+100[Hz]
0: 2nd order FB LPF
1: No FB LPF
2: Observer FB
4: 1st order FB LPF
10: 2nd LPF+SPD_CMD FT
11: SPD_CMD FT
12: SPD_CMD FT+Observer
14: 1st LPF+Observer
Kp of position loop.unit:0.01Hz
Feedforward of position loop, unit: 0.1%
Acceleration forward of position loop, unit: 0.1%
 Loading...
Loading...

