6 Applications
6.4.3 Synchronisation activation and deactivation
(example)
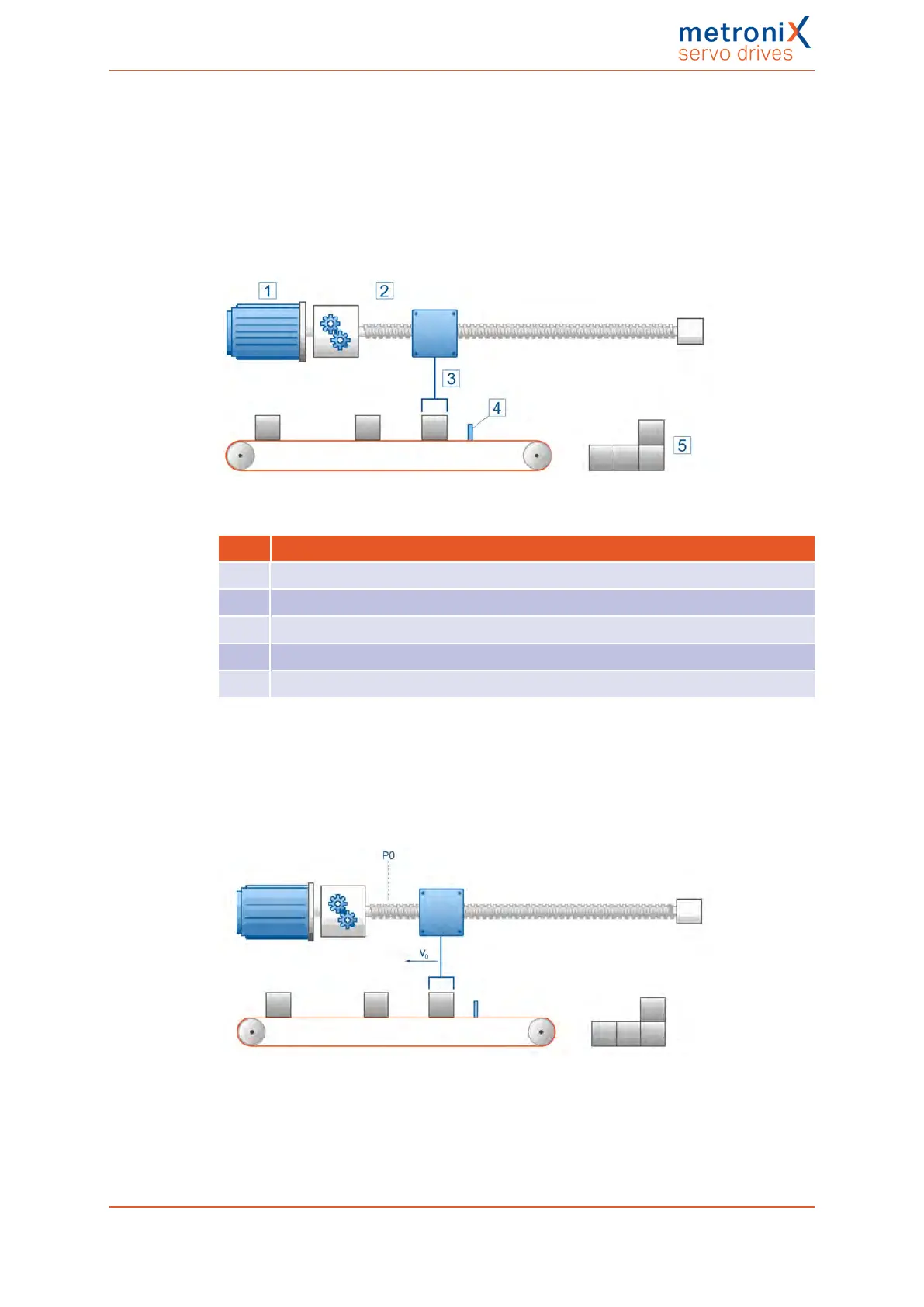
The following example describes how the function "Gripping of moving objects on a
conveyor belt" can be realised. It is assumed that the objects move on a conveyor belt
with the variable speed V
sync
. The gripper is mounted on a linear drive. The gripping
process is triggered by a light barrier.
Figure 62: Flying saw overview
Pos. Description
1 Motor
2 Linear unit (here: spindle axis)
3 Gripper
4 Light barrier
5 Deposit area
6.4.4 Starting position/position set 0
The gripper must move to its starting position P0. This is an absolute positioning process
without any synchronisation. Only the starting position P0, speed of movement V
0
and
acceleration must be specified.
Figure 63: Movement to the starting position
Product manual BL 4000-C Page 111 of 298
 Loading...
Loading...

