7 Additional settings
7.5.3 "X2B/X6" tab
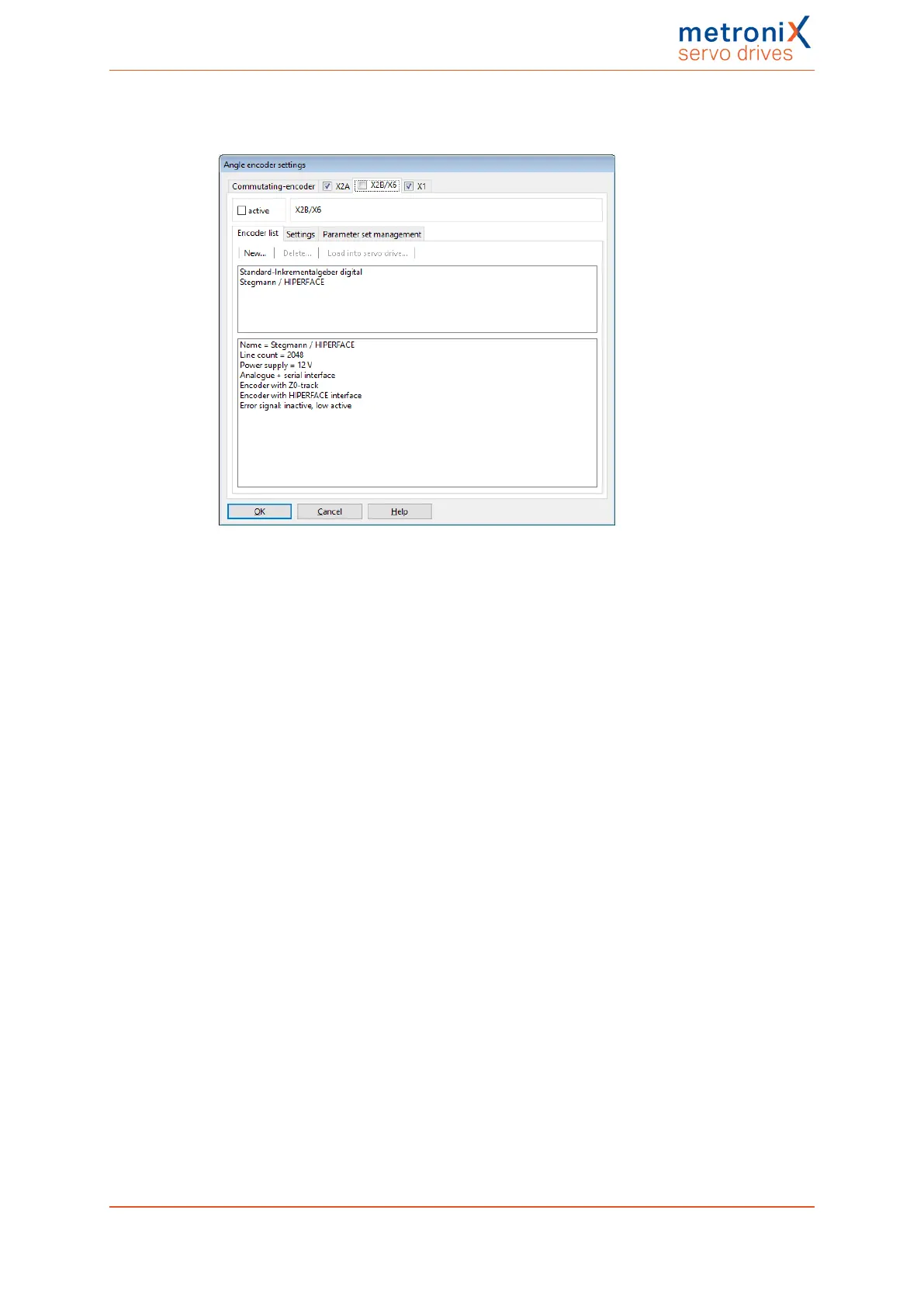
Figure 82: "Angle encoder settings" window - "X2B/X6" tab - "Encoder list"
Different types of encoders can be connected to X2B (see alsosection 12.5 Encoder
connector [X2B] on page 220):
l Digital incremental encoders (RS422, HALL sensors)
l Analogue incremental encoders (1V
ss
)
l Incremental encoders with a serial interface (RS485 level, e.g. EnDat,
HIPERFACE
®
, BISS)
It is also possible to evaluate an optional error signal (AS/NAS) via pin 6.
Hiperface DSL encoders that are connected to X6 can also be parameterised via this tab.
To force the servo drive to evaluate an encoder connected to X2B/X6, the checkbox
Active must be ticked. The angle encoder can be used for commutation, speed
determination and position determination. In addition, it can be used as a position encoder
(see section 6.3 Applications with several angle encoders on page 104).
Product manual BL 4000-C Page 136 of 298
 Loading...
Loading...

