12 Technical data
12.3 Motor connector [X6]
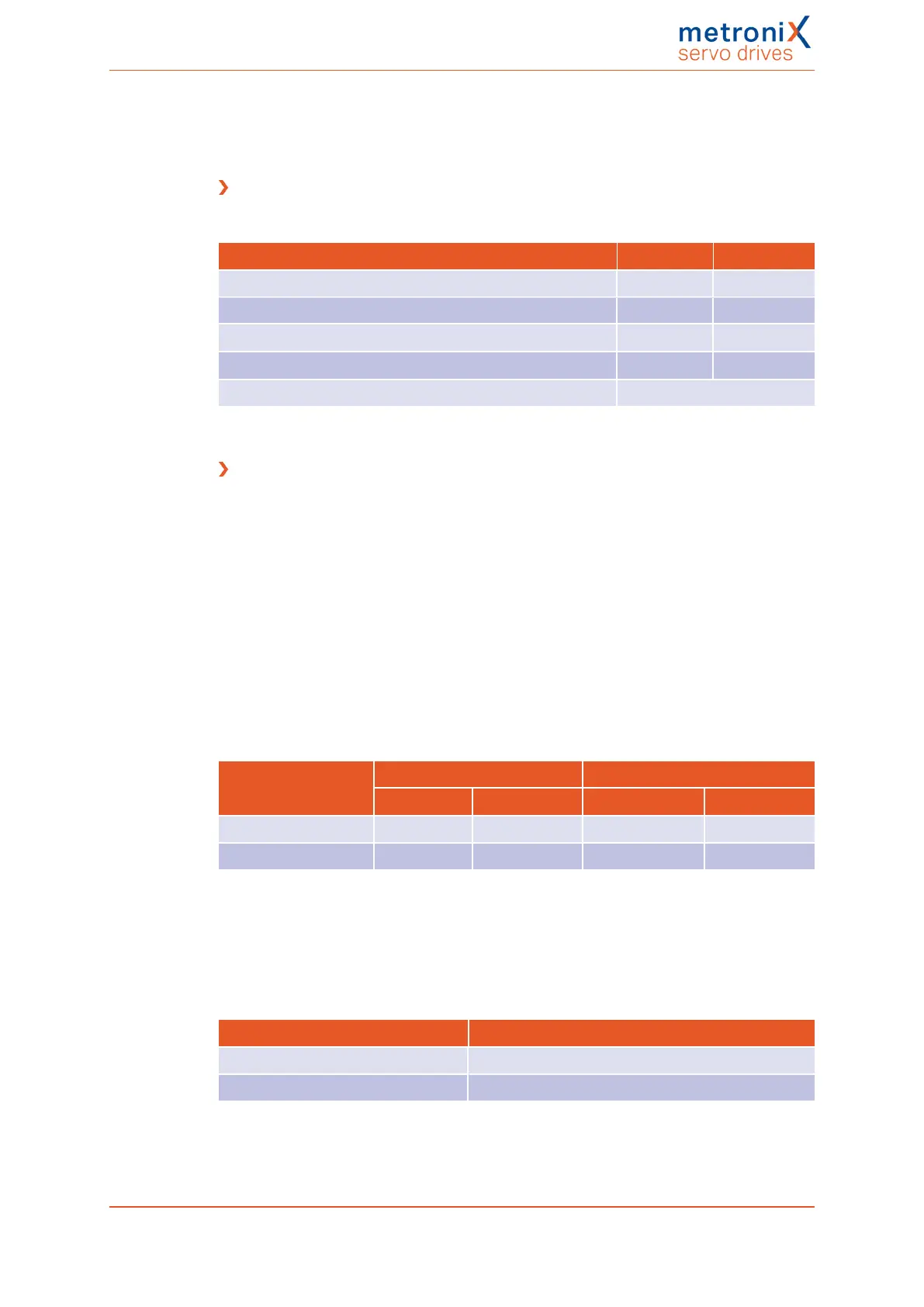
Performance data
Supply voltage 230 VAC [± 10%], 50 Hz
Characteristic BL 4102-C BL 4104-C
Nominal output power 400 W 800 W
Maximum output power for 2 s 1 kW 2 kW
Nominal output current 2 A
eff
4 A
eff
Max. output current for 2 s (f
PWM
= 10 kHz, f
el
> 2 Hz) 6 A
eff
12 A
eff
Power loss/efficiency*) 5% / 95%
*)As a guide value for the control cabinet cooling system.
Current derating
The BL4100-C series servo drives have a current derating during nominal operation. The
rated current and the duration of the maximum permissible peak current of the servo drive
depend on several factors. These factors are:
l Output current level: The higher the output current is, the shorter the permissible
time will be.
l Clock frequency of the power output stage: The higher the clock frequency is, the
shorter the permissible time will be.
l Rotational frequency of the motor: The lower the rotational frequency is, the shorter
the permissible time will be.
The current derating begins as of a PWM frequency of 10 kHz (f
PWM
) and is linear
between the reference values that are stated in the following table:
PWM frequency
f
PWM
*)
BL 4102-C BL 4104-C
I
nominal
I
max
I
nominal
I
max
10 kHz 2 A 6 A 4 A 12 A
16 kHz 1.5 A 4.5 A 3 A 9 A
*)
The PWM frequency is the reciprocal of half of the current controller cycle time t
i
. The
variable cycle times enable particularly high dynamics combined with reduced power
data.
The maximum overload time is also subject to derating as a function of the rotational
frequency (= rotational speed * number of pole pairs). It begins with values below 2 Hz and
is linear up to 0.
f
el
t
max
0 0.2s
>= 2 Hz 2s
Product manual BL 4000-C Page 217 of 298
 Loading...
Loading...

