12 Technical data
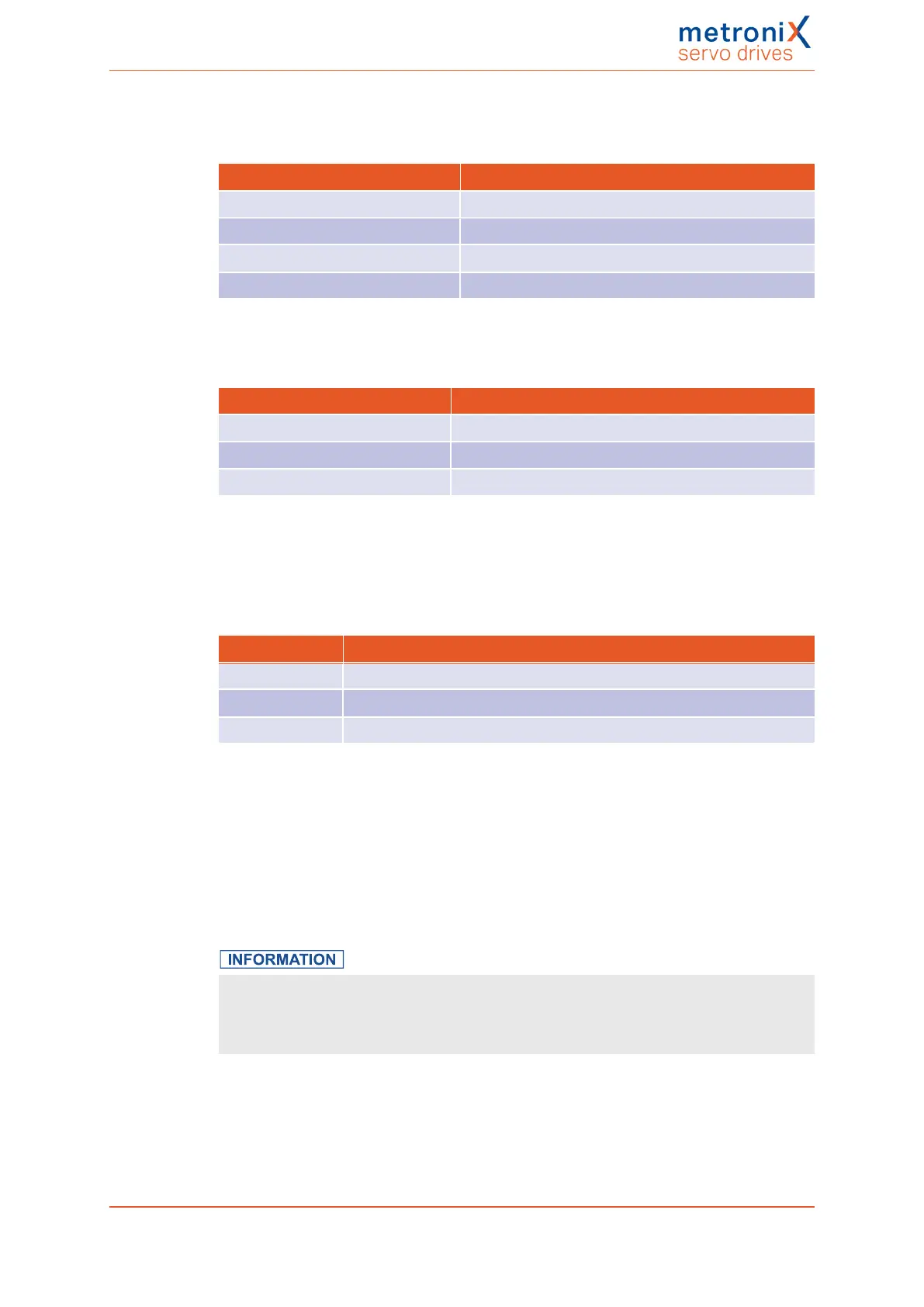
12.6 USB [X19]
Communication interface Value
Function USB 2.0, USB-B, slave-client
Connector type USB-B
Current consumption None (self-powered)
Protocol Metronix-specific (generic device)
12.7 Standard Ethernet [X18]
Communication interface Value
Function Ethernet, 10/100 Mbaud, UDP communication
Connector type RJ45
Protocol TCP/IP
12.8 Real-time Ethernet [X21]
At present, the servo drives of the BL4100-C product range support the following
fieldbuses and application protocols:
Fieldbus Profile
CAN CiA DS 402 CANopen V 2.0
PROFINET Metronix-specific protocol (based on PROFIdrive V3.1)
EtherCAT CoE (Can over EtherCAT)
The support of these fieldbus types is integrated in the servo drive. Additional modules are
not required. The parameterisation is performed with the aid of
MetronixServoCommander
®
.
For further information about the fieldbus connection, see the fieldbus-specific product
manuals (see the section 1.2 Additional documents on page 14).
Suitable EDS (CANopen), GSDML (PROFINET) and XML (EtherCAT) files for the
integration of the fieldbus slave into the environment of an external control system can be
found at https://www.metronix.de.
Compatibility with servo drives of the ARS 2000 series
The behaviour on the bus and the object directory is largely compatible with the
behaviour of the ARS 2000 series. There are certain differences, e.g. in terms of the
device IDs (CANopen product_code ID 1018_02).
Product manual BL 4000-C Page 223 of 298
 Loading...
Loading...

