4 Quick-start guide
4.4.13 Configuration of the position controller
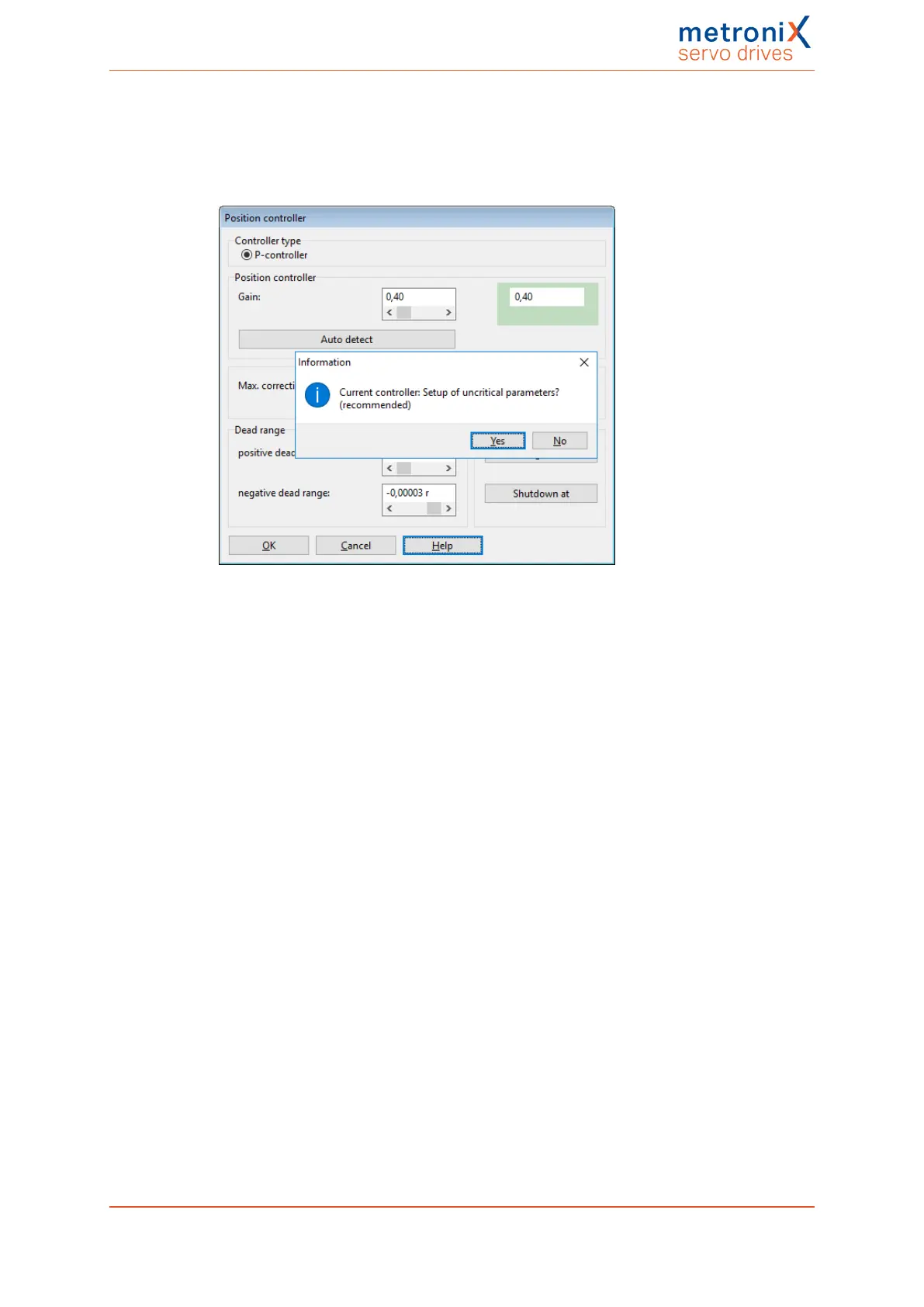
If the automatic identification (FAST) has not been successful, the system suggests
using the default parameters for the position controller.
Figure 20: "Position controller" window
If the automatic identification of the controller parameters has not led to an optimum result,
the drive can be optimised manually. This is described in section 7.6.4 Manual
optimisation of the controllers on page 162.
The following values can be changed:
l Gain: Proportional gain of the position controller.
l Max. correction speed: Here, you can define the speed to be added to the speed of
movement in the event of a following error.
l Dead range: negative and positive dead range: Here, you can specify a permissible
distance between the setpoint value and the actual value within which the position
controller will not become active.
Product manual BL 4000-C Page 59 of 298
 Loading...
Loading...

