4 Quick-start guide
4.4.3 Adjusting the input limits
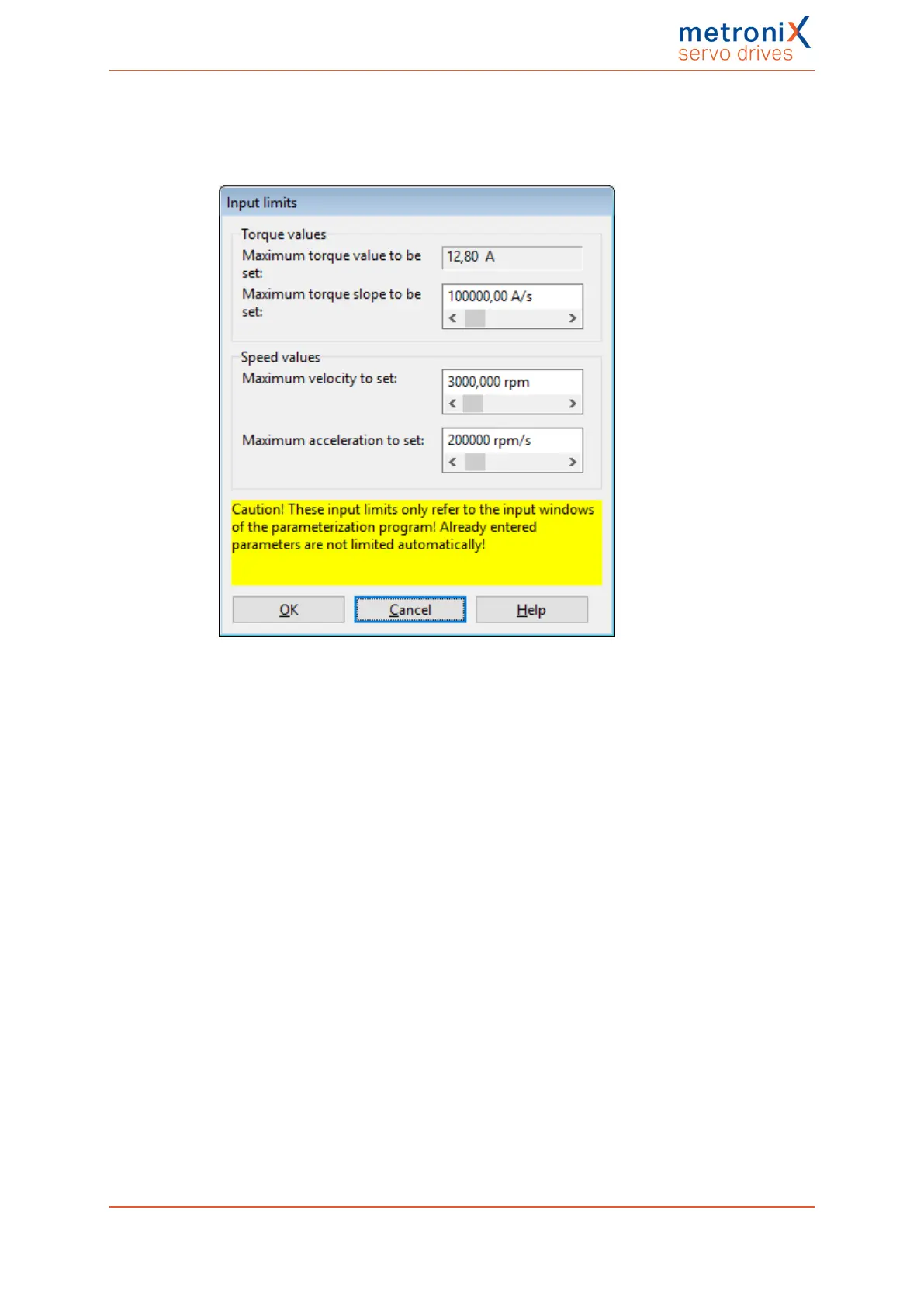
Via the menu Options/Input limits, the following window can be accessed:
Figure 11: Input limits
Enter the maximum speed and acceleration values that you are expecting for your
application. The MetronixServoCommander
®
program uses these values for limiting the
entries into the program. Any values that are already present in the servo drive will not be
limited by this process.
Product manual BL 4000-C Page 46 of 298
 Loading...
Loading...

