6 Applications
6.1.12 Parameterisation of the homing run: motion profile
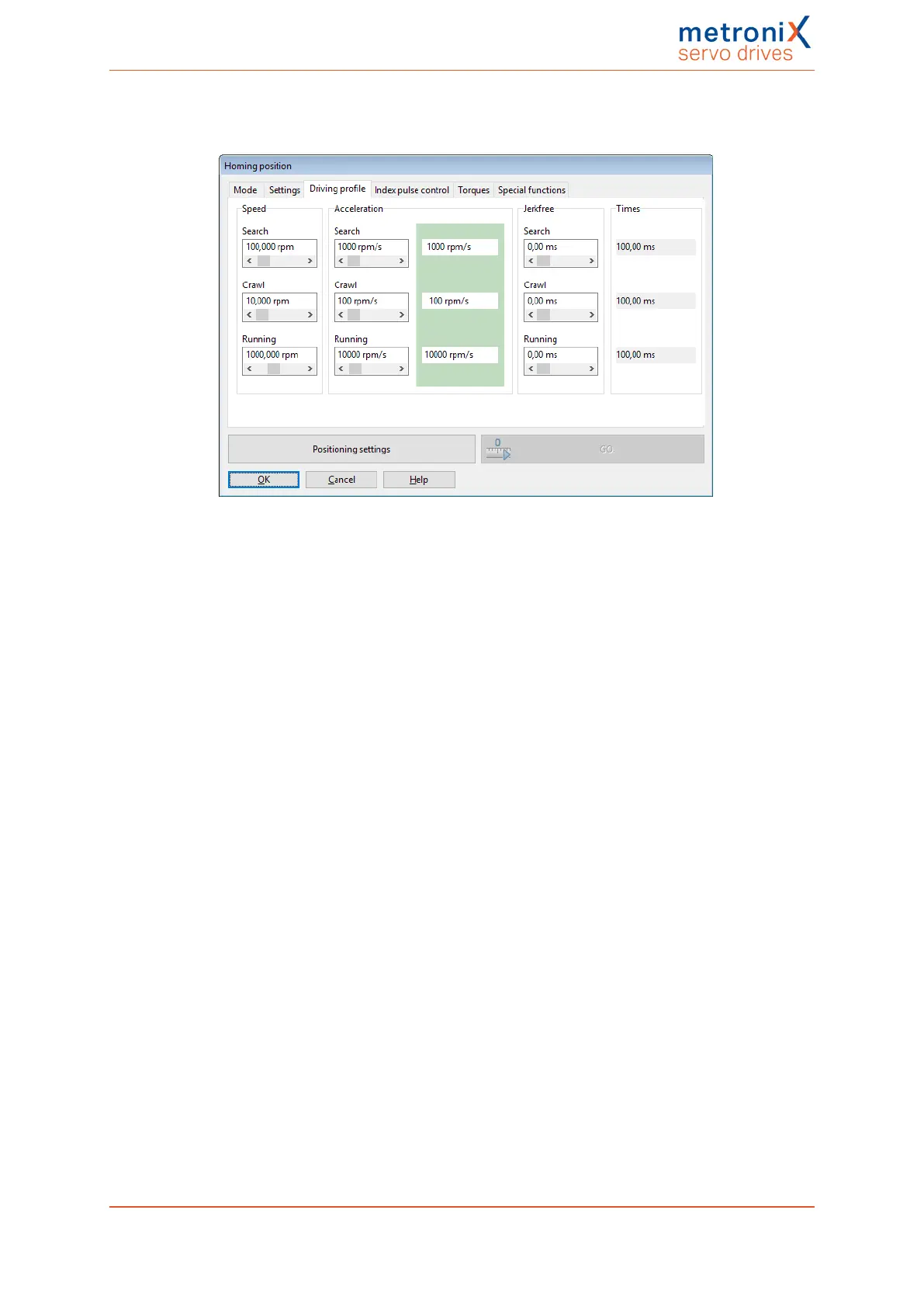
Figure 42: "Homing position" window - "Driving profile" tab
Here, you can enter speed and acceleration values as well as jerk-free parameters for the
following processes:
l Search
Movement of the drive until it reaches the target (limit switch, reference switch,
stop)
l Crawl
Reversal of the movement (at low speed) to determine the contact threshold
l Running
Optional movement to the zero point (reference point) of the application
Product manual BL 4000-C Page 82 of 298
 Loading...
Loading...

