4 Quick-start guide
4.4.7 Commutation encoder
This menu is used to define the input through which the servo drive will receive its
commutation information. The menu can also be opened via Parameters/Device
parameters/Actual value selection.
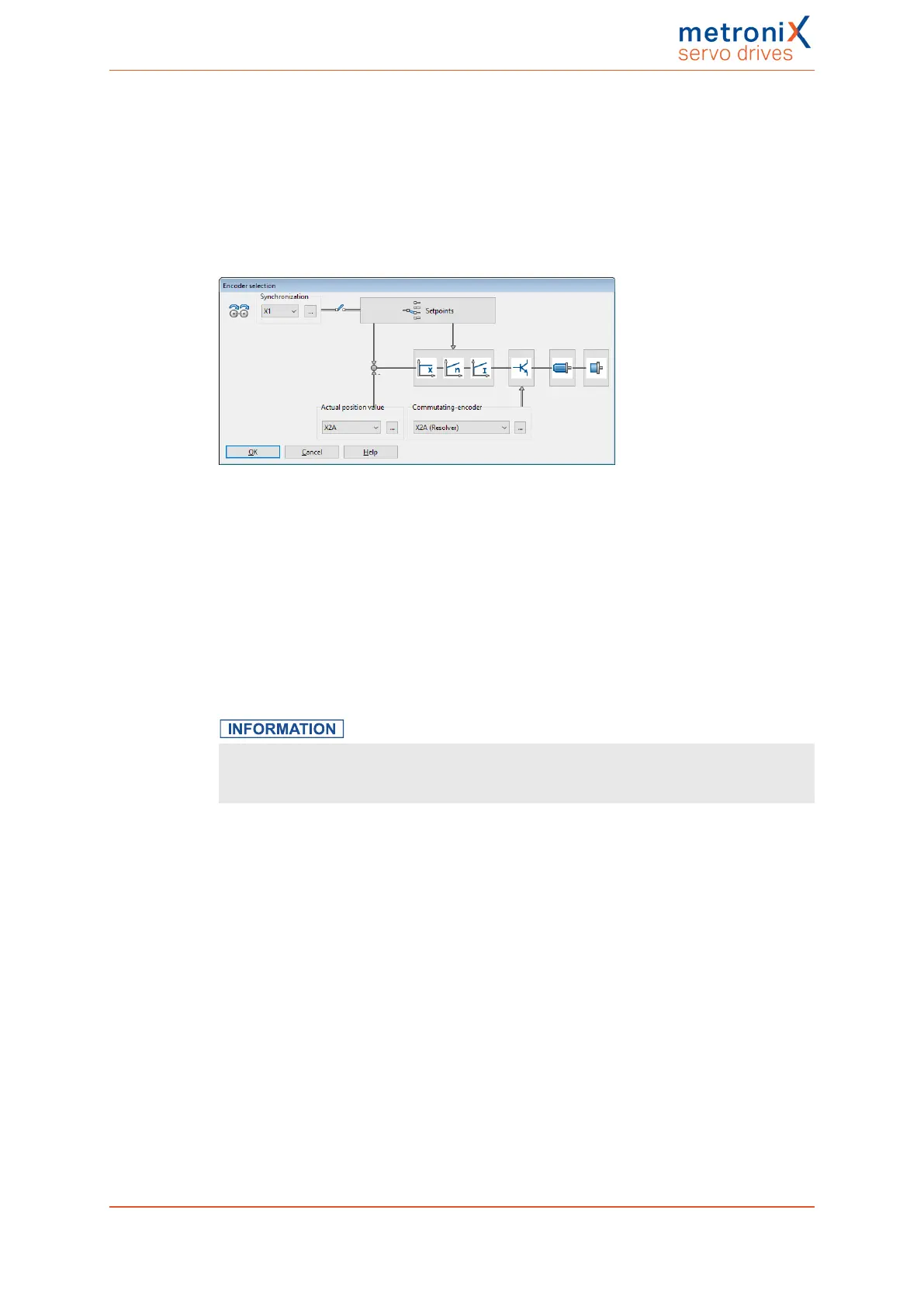
State the connection through which the commutation information and the actual speed
value will be provided.
Figure 15: "Encoder selection" window
The actual value selection defines the encoder signal for feedback. The signals X2A, X2B
and X1 are available. An angle encoder is assigned to these signals in the angle encoder
menu (Settings button). You can define separate angle encoders for the acquisition of the
actual position value (Actual position value), commutation (Commutating encoder) and
synchronisation. See section 6.3 Applications with several angle encoders on page 104.
The selected configuration is shown in the form of an overview.
The setpoint selector and the controller overview are provided in the form of buttons used
to activate the corresponding dialogues.
Buttons
You can use the buttons to quickly open the associated menus (e.g. setpoint selection).
This option is disabled during the commissioning process.
Product manual BL 4000-C Page 53 of 298
 Loading...
Loading...

