7 Additional settings
7.5.3.5 Serial:HIPERFACE
Sick-Stegmann encoders with a Hiperface interface have a serial communication channel
via which the servo drive can communicate with the encoder. It is used, for example, to
determine the commutation position. In addition, it is possible to access the type plate of
the encoder to read out certain characteristics such as the line count, for example. As a
result, the line count does not need to be parameterised in the case of Hiperface encoders.
The EEPROM, which is often included in this type of encoder, can be used for saving and
loading parameters in the servo drive (see section 7.5.3.8 Storing parameters in the
encoder on page 148).
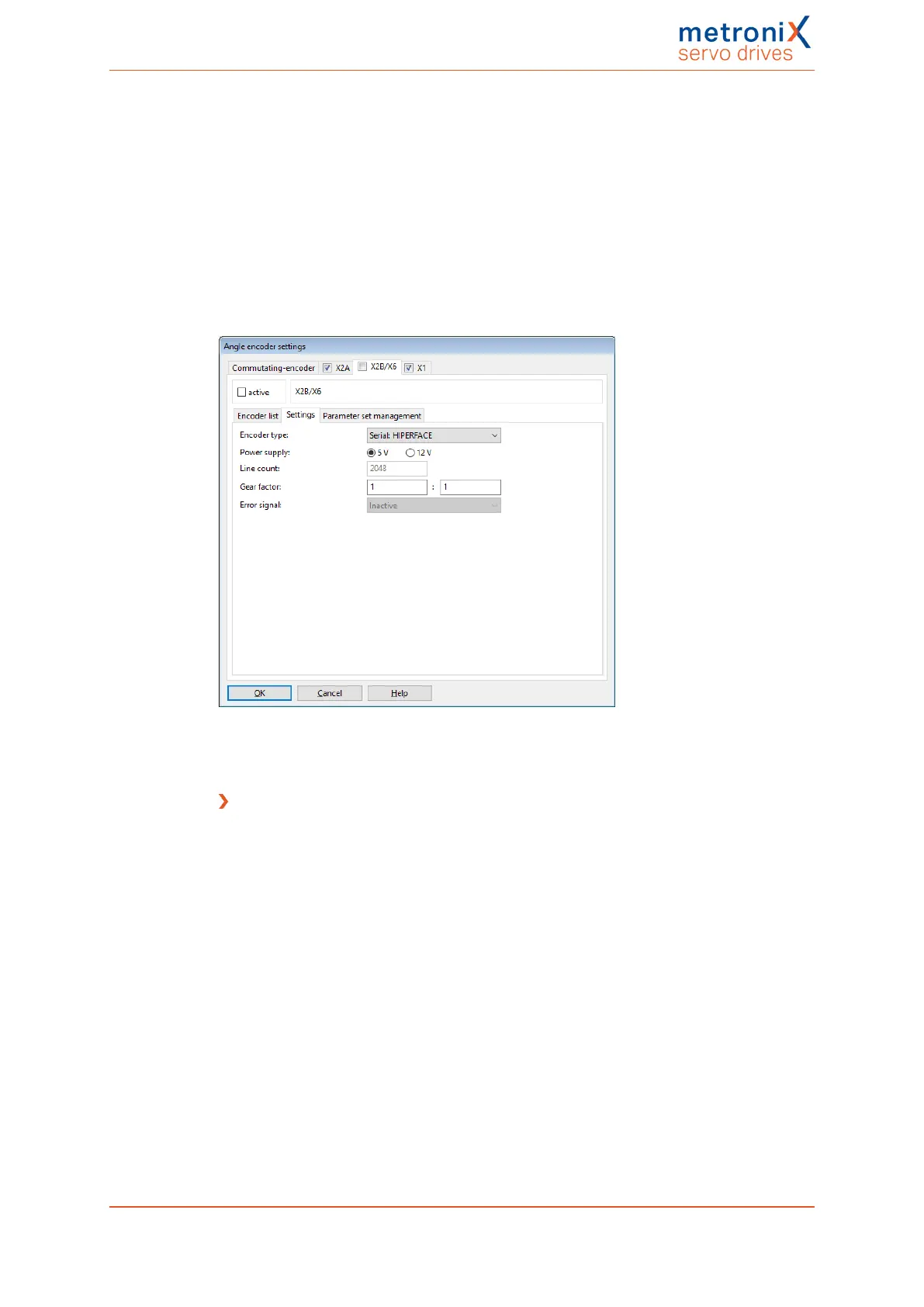
Figure 87: “Angle encoder settings” window – “X2B/X6” tab – “Settings” – “Encoder type:
Serial: HIPERFACE”
Encoder type
To use this type of encoder, Serial: HIPERFACE must be selected.
Product manual BL 4000-C Page 144 of 298
 Loading...
Loading...

