4 Quick-start guide
4.4.8 Angle encoder settings
Parameters/Device parameters/Angle encoder settings/X2B
The menu is skipped during the commissioning process, if a resolver (X2A) is used as the
commutation encoder.
If the commutation encoder is connected to X2B, additional information about the angle
encoder must be provided. This can be done in this menu.
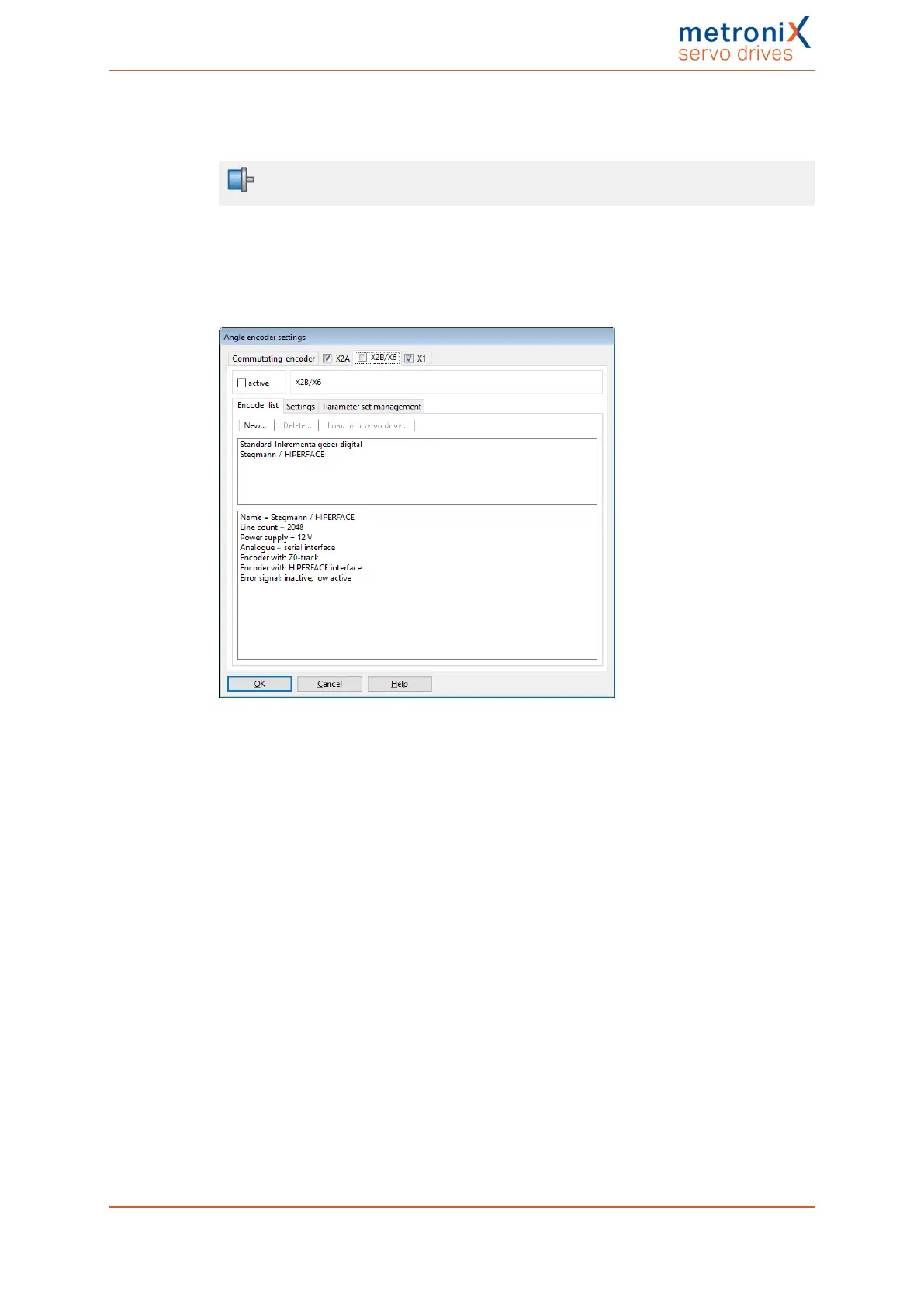
Figure 16: "Angle encoder settings" window - "X2B/X6" tab
First, you need to tick the checkbox active so that the servo drive will evaluate the
encoder information of this connection.
You can use the tab Encoder list to select your specific encoder type or encoder series
from a list of predefined encoders. In the case of encoders with serial connection for
communication with the servo drive, all of the relevant information will then be read out of
the encoder.
However, the encoder settings can also be defined manually on the Settings tab. All of the
setting options are explained in detail in section 7.5 Angle encoder settings on page 134.
Product manual BL 4000-C Page 54 of 298
 Loading...
Loading...

