7 Additional settings
7.6.3.3 Settings in the homing menu for linear motors
After the commutation position of a motor without a commutation encoder has been
determined, the configured homing run will be started automatically. This is necessary, as
the system lacks reference with regard to the mechanical system of coordinates.
When a motor without a commutation encoder is started for the first time, it is possible to
read in a reference pulse via the index pulse track at connector X2B (see below).
However, in this case, it must be ensured that only one reference pulse occurs over the
range of movement.
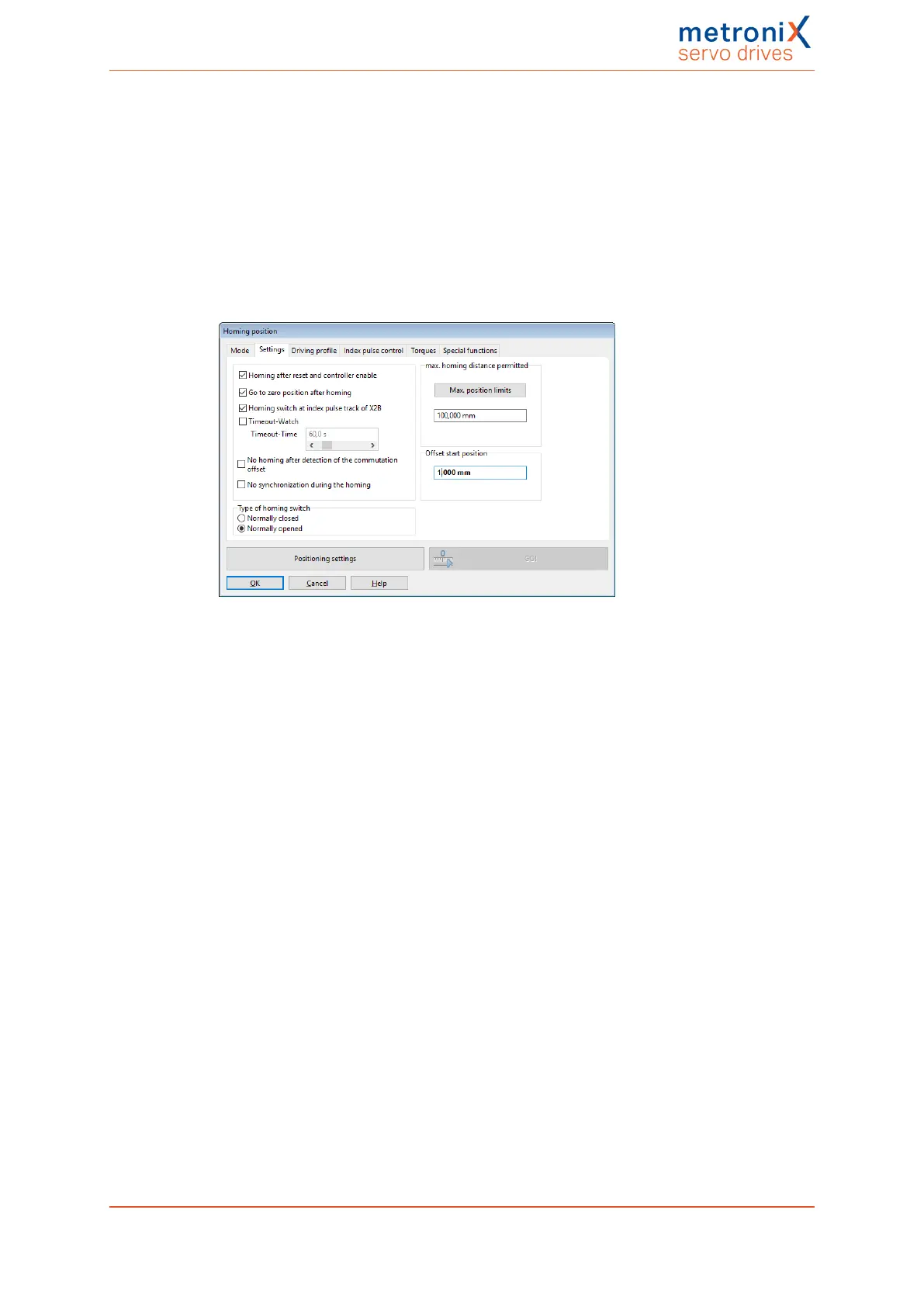
Figure 94: "Homing position" window
We recommend performing a homing run with an offset (1 mm) if a stop is used for homing
(see section 6.1.1 Methods -17 and -18: Stop on page 74). Otherwise the drive may rest
stuck to the stop (or to the compressed rubber buffer) and the I²t value increases as the
system permanently requires high current.
Product manual BL 4000-C Page 160 of 298
 Loading...
Loading...

