6 Applications
6 Applications
6.1 Homing process
Every positioning control requires a defined zero point (reference point) at start-up, which
can be determined by way of a homing run (this is not required in the case of multi-turn
encoders). The servo drive can perform this homing run automatically. It evaluates several
inputs, e.g. the limit switch inputs or a stop, as the reference signal.
A homing run can be started via a fieldbus, MetronixServoCommander
®
or a digital input.
It can also be performed automatically when the servo drive is enabled. For homing,
several different methods have been implemented following the DSP 402 CANopen
protocol. Most methods consist of 3 parts: a search run (1), a crawl run (2) and the
movement to the home position (3). First, the system tries to locate a reference signal
(e.g. a switch) at search speed. During the crawl run, the system leaves the switch slowly
to determine a more precise position. To increase the level of accuracy even more, an
additional reference point (e.g. the zero signal of an angle encoder) can be used. In
addition, the option Go to zero position after homing can be activated so that the system
moves to the determined home position at the end of the homing run. If this option is not
activated, this would not always be the case due to the deceleration process and the use
of additional reference points. If a homing process is started via CANopen, there will be no
follow-up positioning to the home position.
The ramps and speed values for the homing run can be parameterised and the homing run
can be performed in a time-optimal and jerk-free manner. The successful completion of the
homing run is indicated by a set status bit in the device. This can also be output via a
digital output.
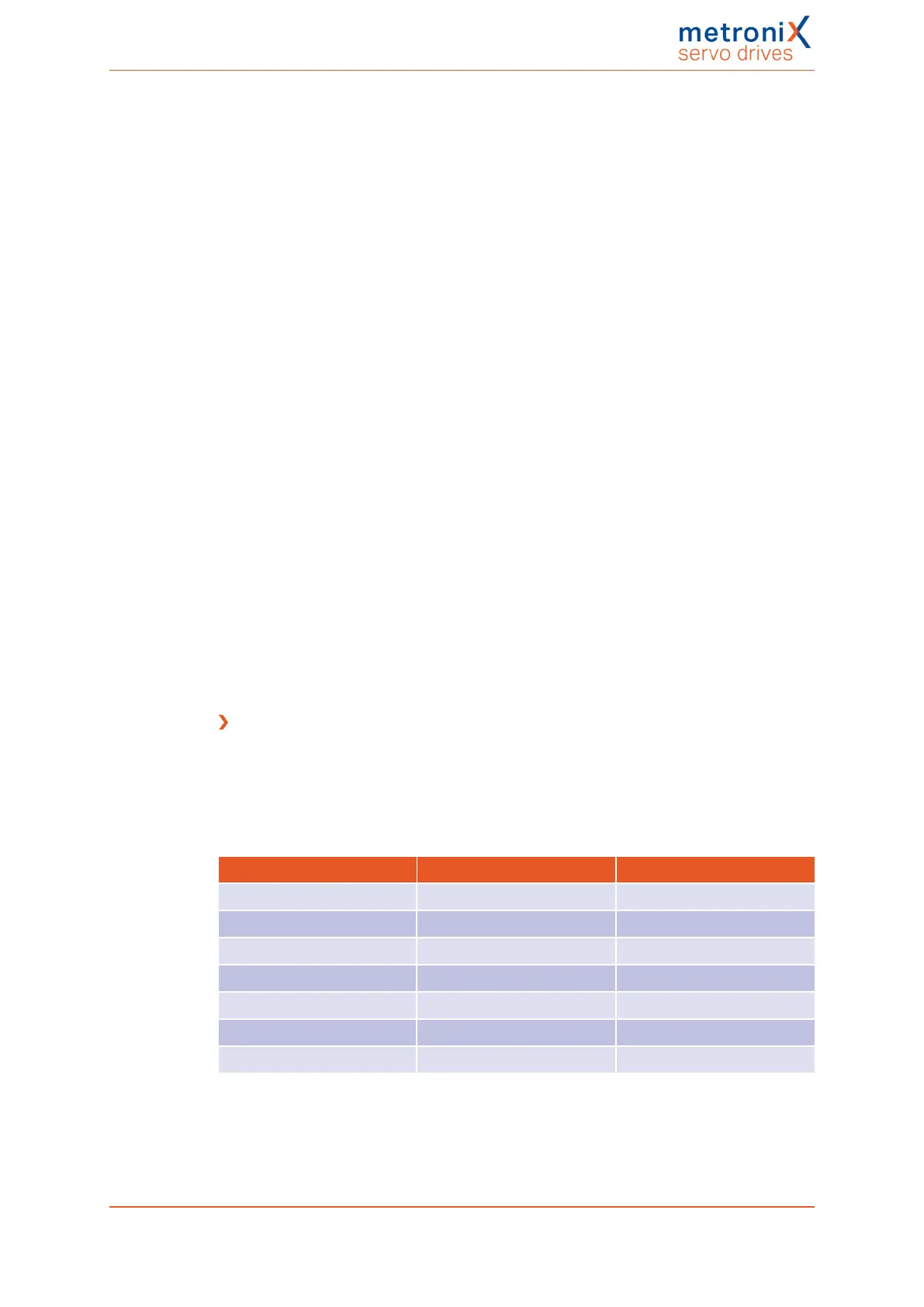
Homing methods – overview
The following table provides a rough classification of the homing methods based on the
target and reference point. For a detailed description, see the next sections. The
movement to the home position is always included in the schematic representations of the
homing run. Not all of the included movements may actually be performed, e.g. if the
position of the index pulse is already known.
Target Reference point Methods
Stop Stop -18, -17
Stop Index pulse -1, -2
Limit switch Limit switch 17, 18
Limit switch Index pulse 1, 2
Reference switch Reference switch 23, 27
Reference switch (pos/neg) Reference switch -23, -27
Reference switch Index pulse 7, 11
Product manual BL 4000-C Page 73 of 298
 Loading...
Loading...

