12 Technical data
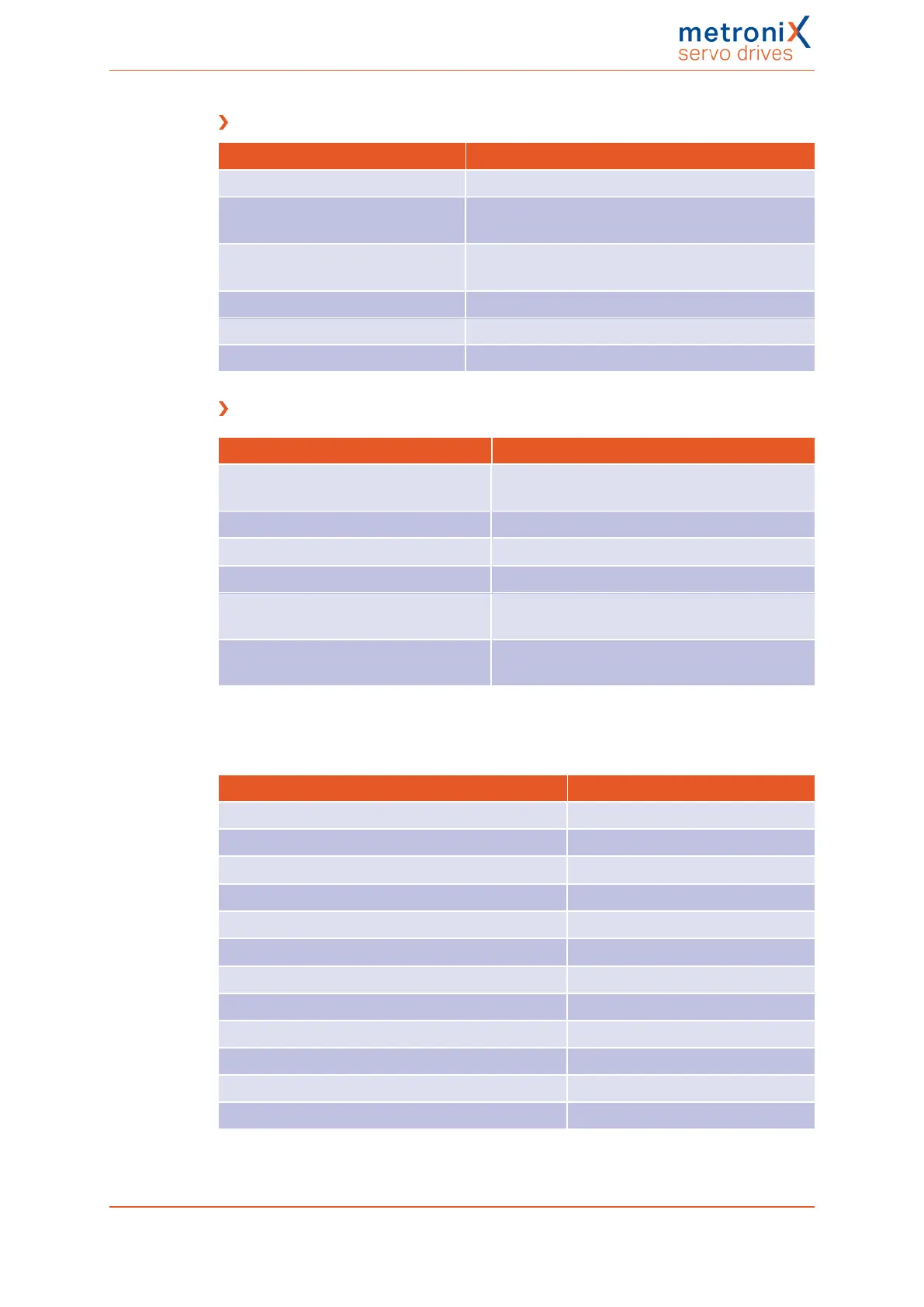
Output for the holding brake in the motor
Characteristic Value
Nominal voltage 24 V
Nominal current 2 A (total of all digital outputs and of the holding
brake: 2.5 A max.)
Voltage drop referred to the 24 V
input with a load current of 2 A
approx. 1.5 V
Overload protection Yes, current limitation to 3 A max.
Overvoltage protection up to 60 V
Internal flyback diode Yes
Hiperface DSL
®
connector [X6]
Characteristic Value
HPF_DSL-, HPF_DSL+ In accordance with the Hiperface DSL
specification RS485
Baud rate 9.37 MHz
Frame rate 12.1 to 27 µs
Supply voltage 10 V (250 mA)
Supported transfer modes Transfer of short and long messages with
storage of the set of parameters in the encoder
Characteristic impedance of the cable
and line termination
110 Ω
12.4 Resolver connector [X2A]
Characteristic Value
Transformation ratio 1:2 to 1:4
Carrier frequency 5-10 kHz
Excitation voltage 5-6 V
eff
, short-circuit-proof
Excitation impedance (at 10 kHz)
4 Ω
Stator impedance
> 30 Ω
Measuring range (for Hall sensors) 7 V
ss
Resolution 14 bits
Signal detection delay < 200 µs
Speed resolution approx. 5 rpm
Actual speed value filter 400 µs
Absolute angle detection accuracy < 0.022°
Max. speed 16,000 rpm
Product manual BL 4000-C Page 219 of 298
 Loading...
Loading...

