12 Technical data
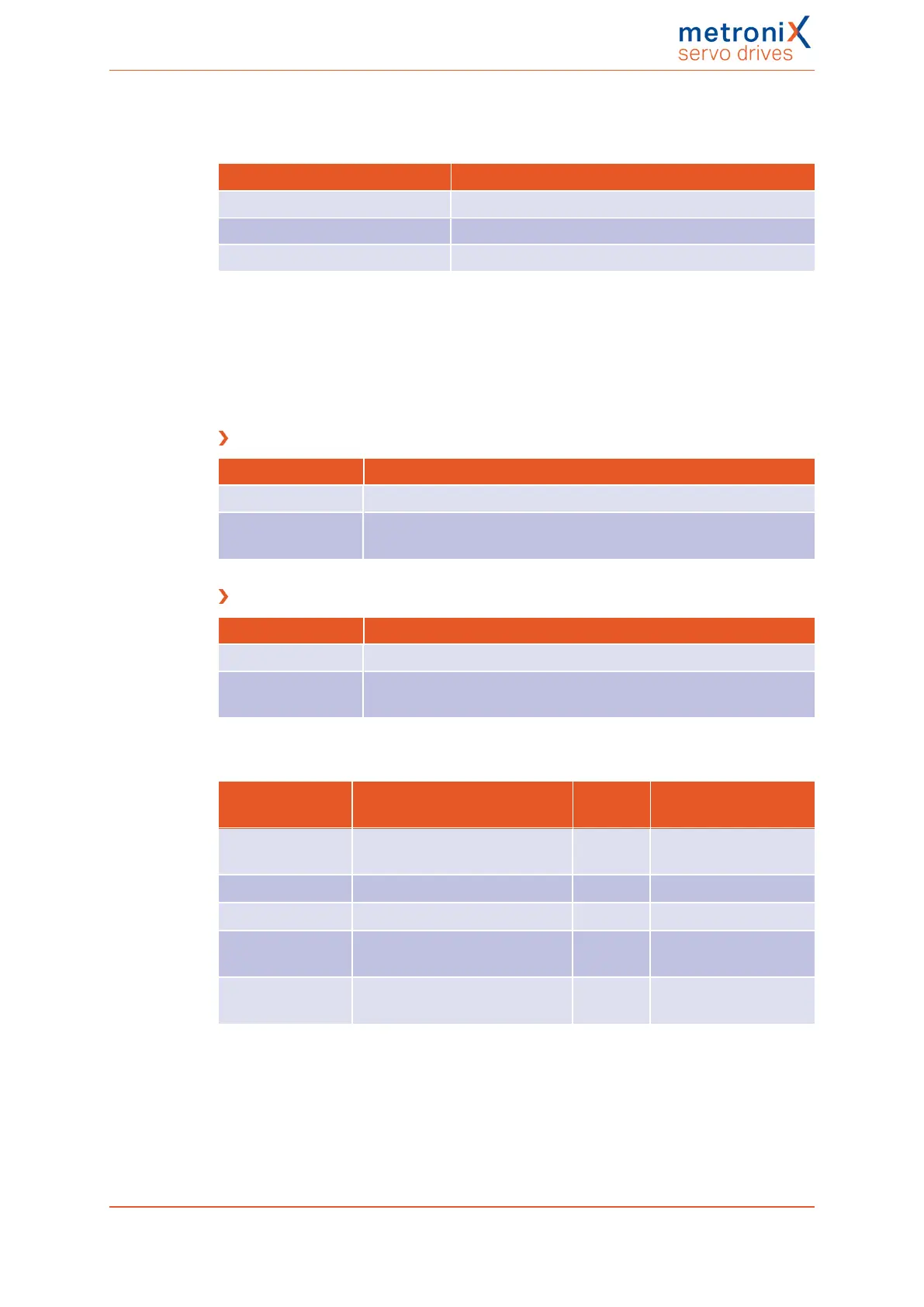
12.9 CAN bus [X4]
Communication interface Value
Standard ISO/DIS 11898-2, CAN 2 0A
Baud rates 50, 100, 125, 250, 500, 1000 kbit/s
Protocol CANopen, as per DS301 and DSP402
12.10 I/O Interface [X1]
The BL 4000-C servo drive has 3 digital outputs (DOUT), 9 digital inputs (DIN) and 2
analogue inputs (AIN).
Digital outputs
Characteristic Value
Nominal voltage 24 V
Output current Approx. 1 A per output, but 2.5 A max. in total, including the brake
output
Digital inputs
Characteristic Value
Nominal voltage 24 V as per DIN EN 61131-2 (15 V, < 10 V low to 30 V high)
Current
consumption
3.2 mA max.
The mode of operation of the digital outputs can be configured to a large extent. The
default setting is stated in brackets.
Characteristic Value Filter
time
Max. jitter
DIN0...DIN3 Freely configurable
(position selector)
4 x t
x
*) 1 x t
x
DIN5 Controller enable signal 4 x t
x
1 x t
x
DIN6, DIN7 Limit switch 0, 1 4 x t
x
1 x t
x
DIN4 Freely configurable
(positioning start)
4 x t
x
1 x t
x
,
(15 ns for sampling)
DIN8 Freely configurable
(sampling, flying saw)
4 x t
x
1 x t
x
,
(15 ns for sampling)
*) t
x
corresponds to the configurable position controller cycle time
Product manual BL 4000-C Page 224 of 298
 Loading...
Loading...

