7 Additional settings
7.5.4 "X1" tab
Parameters/Device parameters/Angle encoder/Settings...
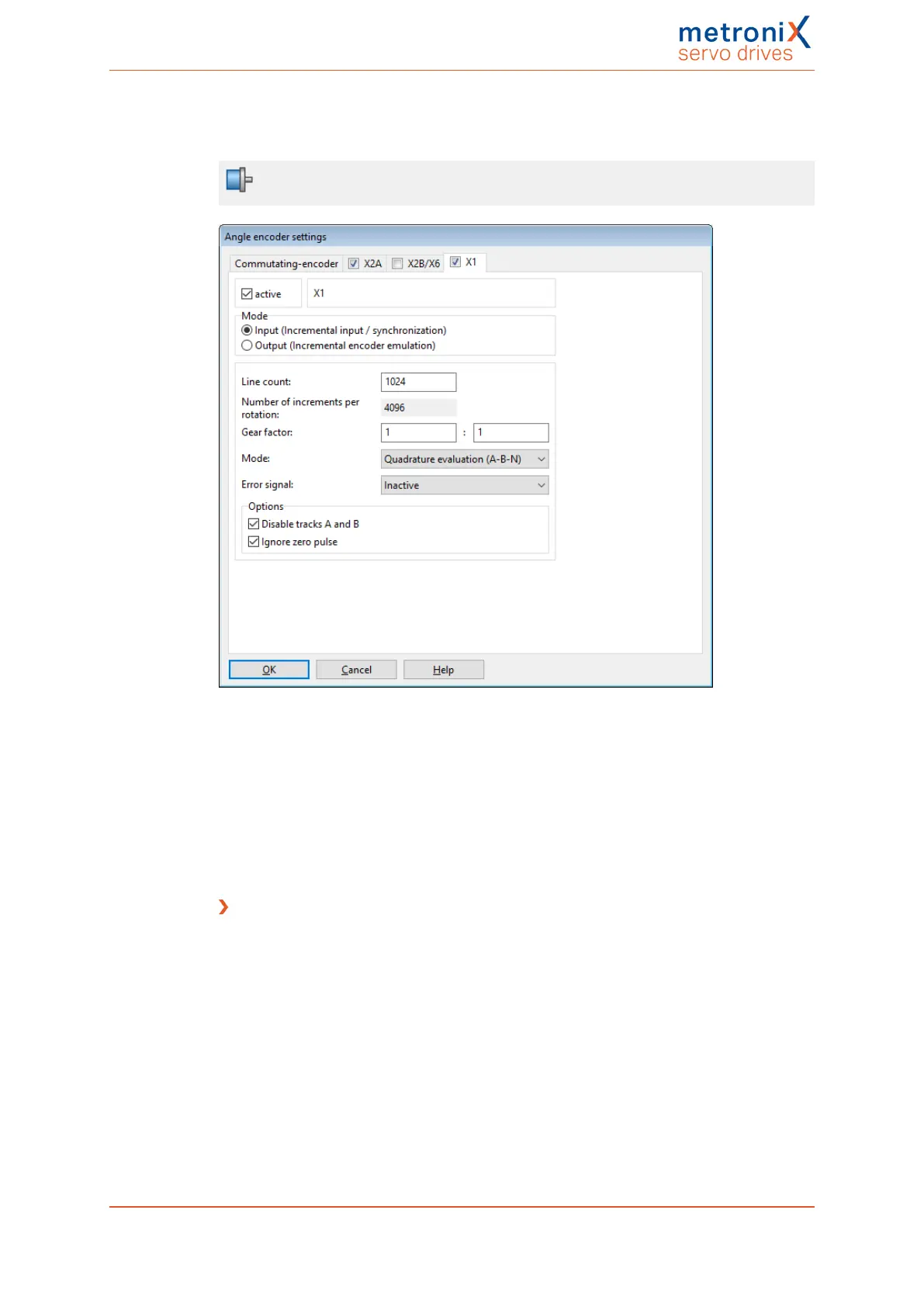
Figure 91: "Angle encoder settings" window - "X1" tab
Here, you can specify whether the inputs at connector X1 will be used as the master
frequency input or output.
If "Input" is selected, you can either connect the master frequency output of another
BL4100-C servo drive or an incremental encoder (quadrature evaluation).
Alternatively, the connector can be used as a pulse direction interface or up/down counter.
Gear factor
The factory setting of the gear factor is 1. The gear factor determines the conversion of an
external position setpoint with regard to the actual position.
Product manual BL 4000-C Page 151 of 298
 Loading...
Loading...

