6 Applications
6.4.6 Depositing of the object/position set 2
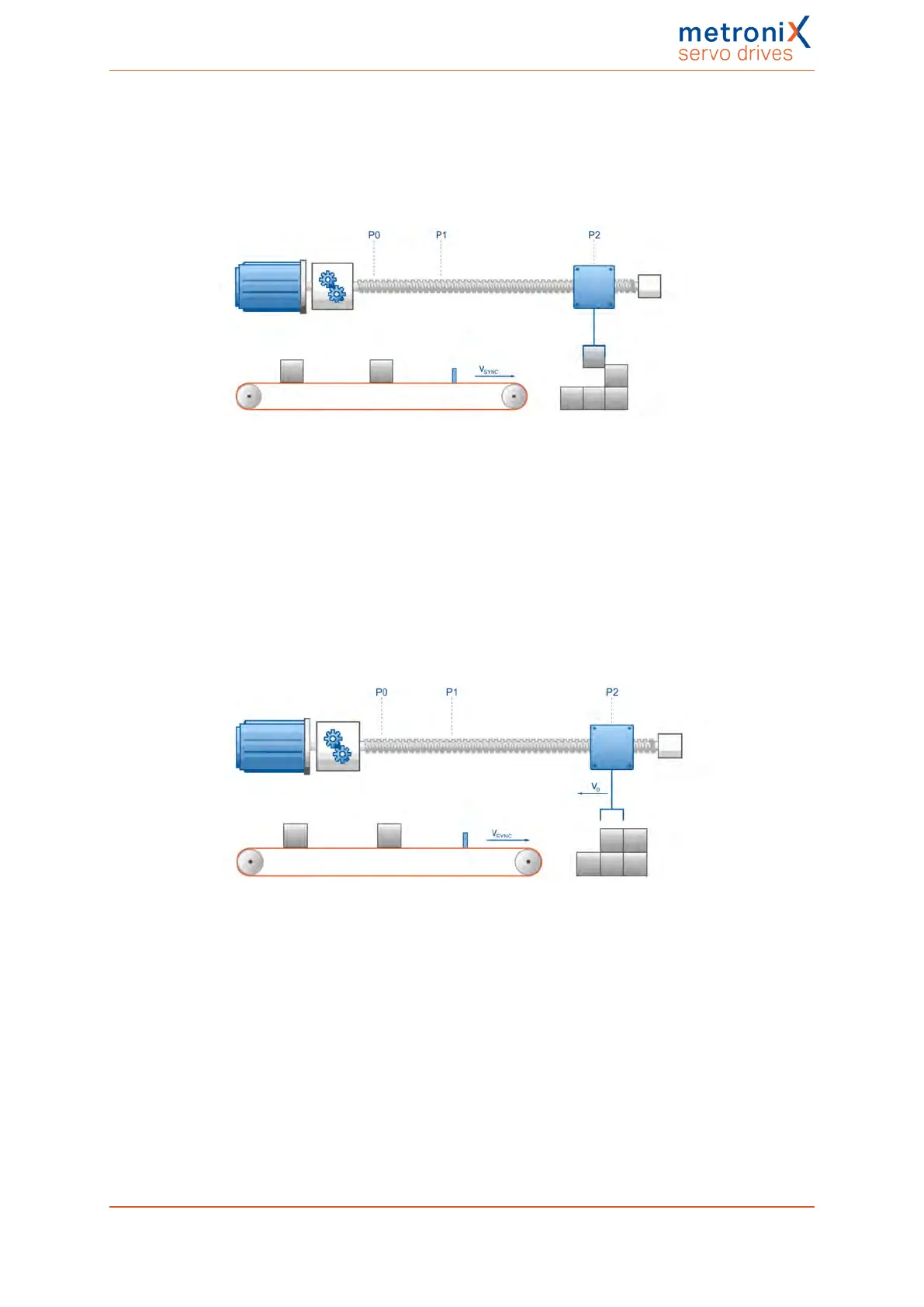
The gripper must now deposit the object on the pallet. The precise starting position of this
positioning process is not known. This is why the gripper must move to the pallet based on
an absolute target position.
Figure 65: Depositing of the object
The option Synchronised must be deselected. As a result, the synchronisation will be
deactivated when the positioning process begins. The positioning process begins with the
current speed setpoint, i.e. with the speed of the master. This results in a controlled
synchronisation deactivation.
6.4.7 Starting position/position set 0
When the object has been placed on the pallet, the gripper can return to the starting
position using position set 0.
Figure 66: Return to the starting position
Product manual BL 4000-C Page 113 of 298
 Loading...
Loading...

