7 Additional settings
7.8.1 Configuration of the digital outputs
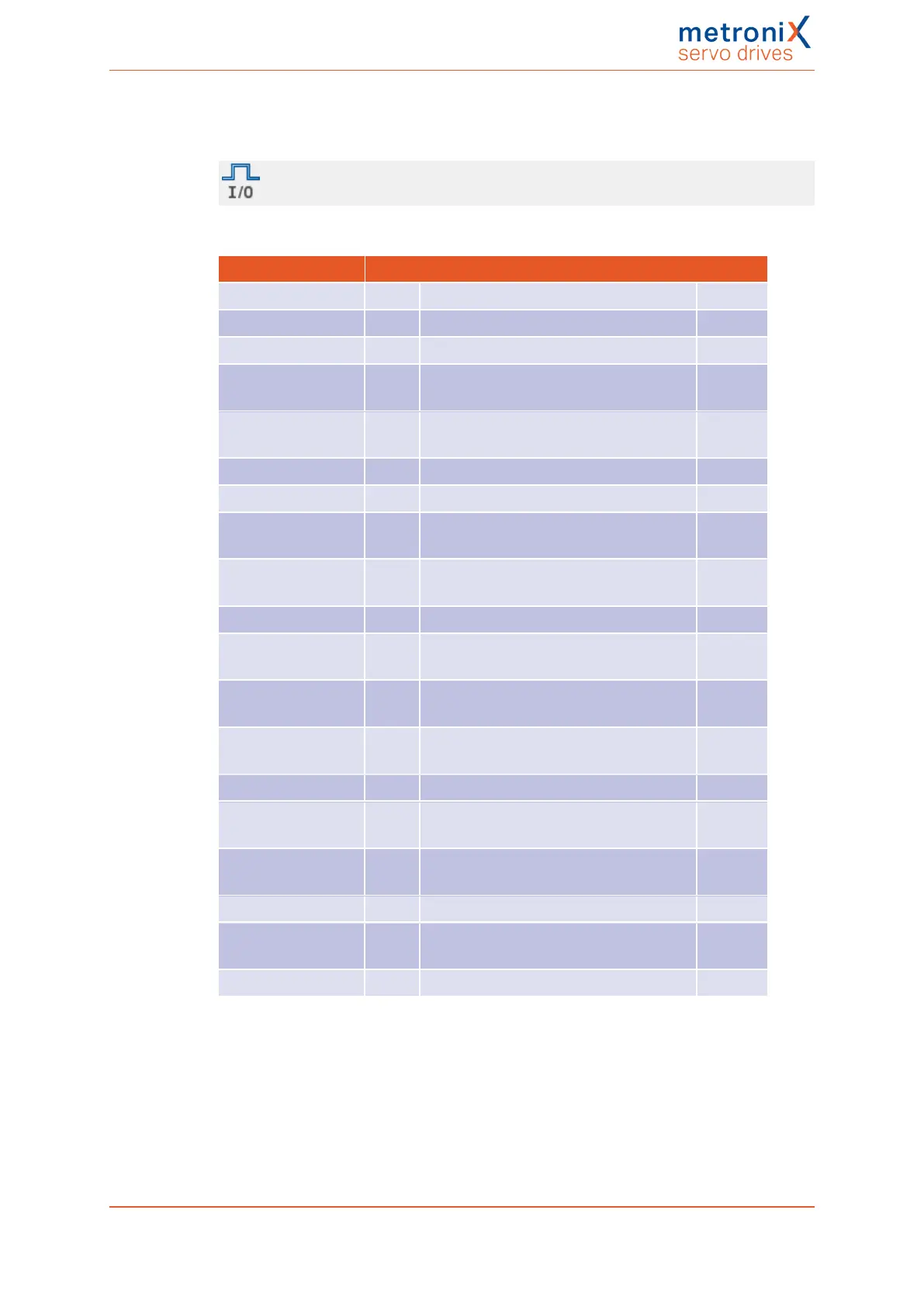
Parameters/IOs/Digital outputs
The following functions can be assigned to a digital output:
Digital output See section
OFF
ON
I²t monitoring active 4.4.4 Configuration of the motor data Page 47
Comparison speed 7.8.2.2 Speed message window: "Comparison
speed reached"
Page 175
Xact = Xdest 7.8.2.3 Target position message window:
"Xactual=Xtarget"
Page 176
Remaining distance 6.2.3 Destination parameters: Settings tab Page 88
Homing active 6.1 Homing process Page 73
Homing position
valid
6.1 Homing process Page 73
Undervoltage 7.11 Configuration of the DC bus monitoring
function
Page 184
Following error 4.4.13 Configuration of the position controller Page 59
Output stage
enabled
5 Enabling the servo drive and selecting
the set values
Page 62
Holding brake
released
7.10 Brake control and automatic brake Page 182
Linear motor
identified
4.4.1 General configuration Page 41
Position triggers 1..4 7.9 Position triggers Page 178
Setpoint lock active 4.4.11 Configuring the polarity of the limit
switches
Page 56
Comparison torque
reached
7.8.2.1 Torque message window: "Comparison
torque"
Page 174
Position set active 6.2.7 Motion program Page 97
Ready to enable 5 Enabling the servo drive and selecting
the set values
Page 62
General error 9 Fault messages Page 208
Product manual BL 4000-C Page 173 of 298
 Loading...
Loading...

