6 Applications
6.2.4 Destination parameters: Driving profile tab
Parameters/Positioning/Destination parameters
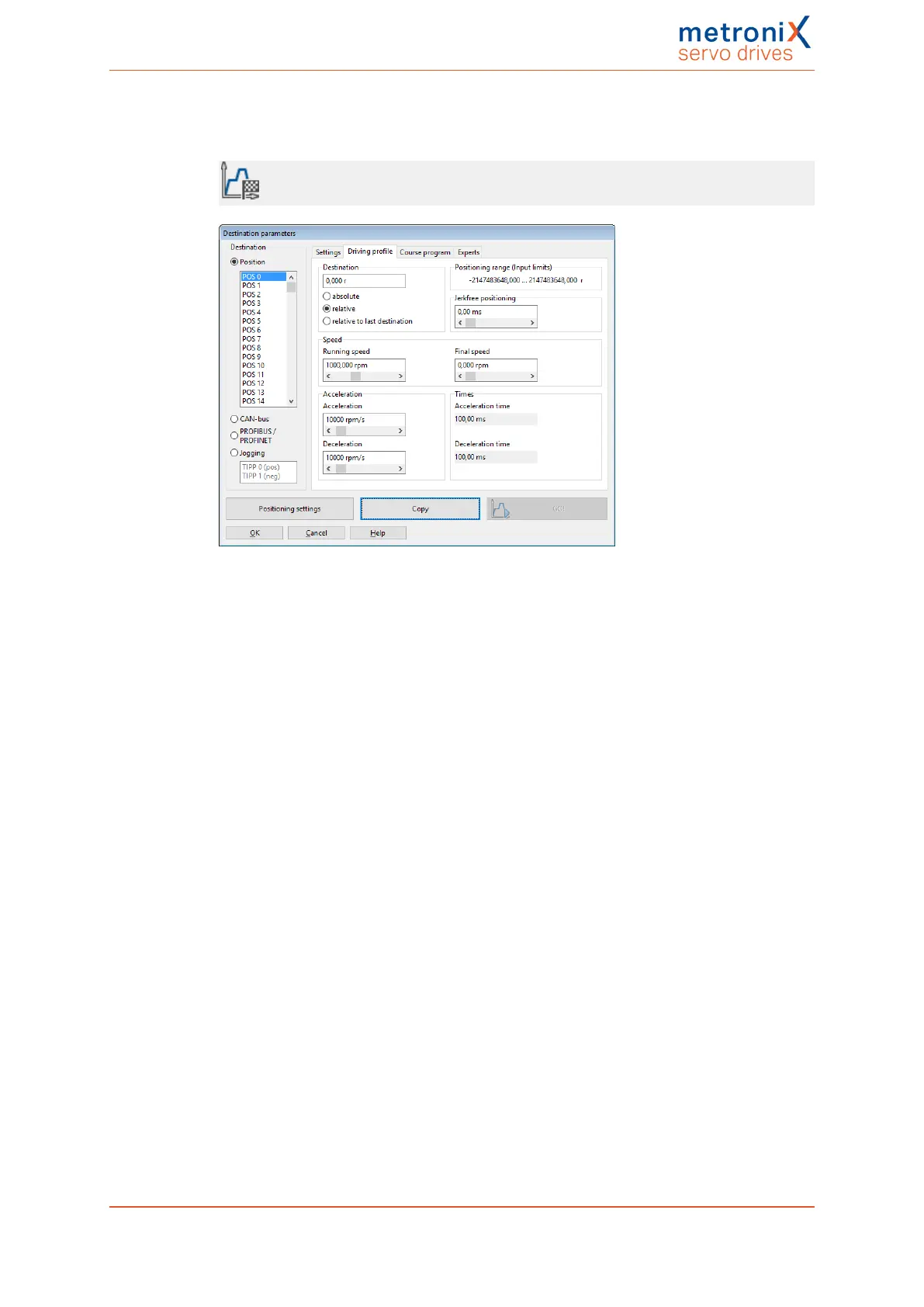
Figure 50: "Destination parameters" window - "Driving profile" tab
You can enter the target position into the field Destination. You can state whether the
specified target should be interpreted as an absolute value (referred to the reference point)
or as a relative value. Relative refers to the current position setpoint, e.g. during a running
positioning run. The option Relative to last destination, on the other hand, calculates the
new position based on the target position that has been or will be reached.
During a positioning run, the required acceleration can be optionally smoothed by way of a
filter. This leads to a jerk-limited or jerk-free positioning run. The associated filter time can
be defined in the field Jerk-free positioning. The acceleration or deceleration process will
be extended by this period of time. The total duration of the positioning run will also be
extended by this filter time. If the jerk-free time exceeds the acceleration or deceleration
time, it may not be possible to reach the specified speed.
The field Speed can be used to specify the speed for approaching the target. The Final
speed is the speed of the drive upon reaching the target. In most cases, it is zero.
A Final speed unequal zero is used to string two positioning runs together without
decelerating the drive to zero. In this case, the Final speed of the first set is set to the
Speed of the second set.
Product manual BL 4000-C Page 90 of 298
 Loading...
Loading...

