6 Applications
The area Reaction concerning NEXT1/NEXT2 signal can be used to specify if and under
which condition positions will be approached. This will be explained based on the example
in Figure 54 (Motion program).
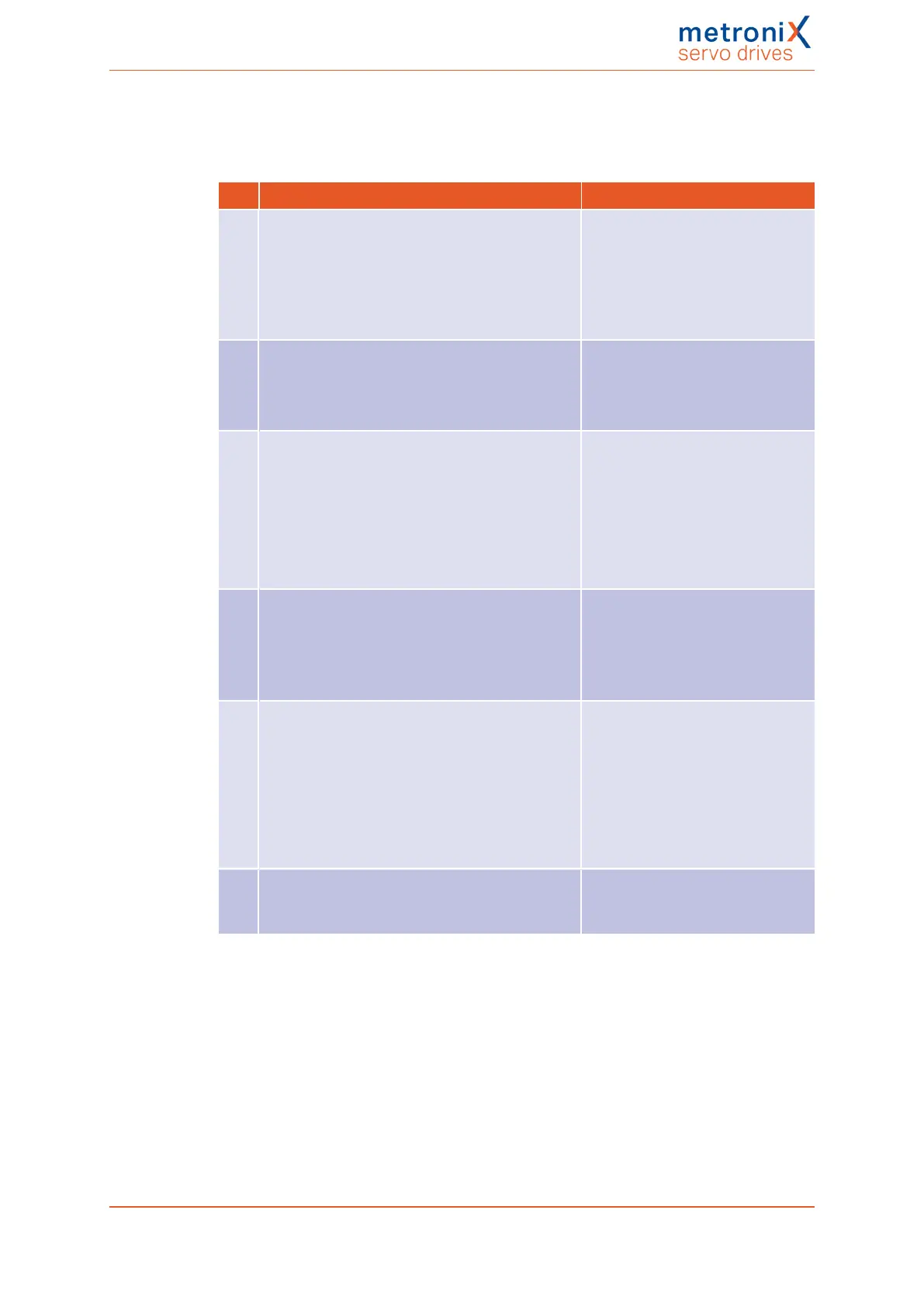
Pos. Task Parameterisation
1 If NEXT1 = 1, move to pos. 3 immediately.
If NEXT2 = 1, move to pos. 6 immediately.
Following position:
Following position 1 = 3
Following position 2 = 6
Reaction to NEXT1/NEXT2:
Evaluate, go to following position
immediately
3 At the end of pos. 3, continue with pos. 4
(without any other condition).
Following position:
Following position 1 = 4
Reaction to NEXT1/NEXT2:
Ignorie, go to following position
4 At the end of pos. 4, continue with pos. 5.
Do not stop after this position.
Following position:
Following position 1 = 5
Reaction to NEXT1/NEXT2:
Ignore, got to following position
Reaction to STOP signal:
Ignore STOP signal for this
position
8 If NEXT1 = 1, first move to pos. 8,
and then to pos. 6.
If NEXT2 = 1, first move to pos. 8,
and then to pos. 9.
Following position:
Following position 1 = 6
Following position 2 = 9
Reaction to NEXT1/NEXT2:
Ignore, if target is not yet reached
8 If NEXT1 = 1, first move to pos. 8,
and then to pos. 6.
If NEXT2 = 1, first move to pos. 8,
and then to pos. 9.
Changes concerning NEXT1/NEXT2 are saved
during the movement to pos. 8.
When pos. 8 is reached, the most recent signal
flank at NEXT1/NEXT2 is evaluated.
Following position:
Following position 1 = 6
Following position 2 = 9
Reaction to NEXT1/NEXT2:
Evaluate, first go to target, then to
following position
9 Final position, stop of the motion program. Reaction to NEXT1/NEXT2:
Final position (ignore following
position.
The motion program stops when a final position is reached or when a STOP signal is
detected. The assignment of the stop signal is explained in section 7.7 Digital inputs on
page 168.
If the motion program should not be stopped at certain steps, the options Ignore STOP
signal for this position (signal is saved) can be selected. In this case, the drive will move
to the next position and then it will stop (provided this option has not been set for this
position, too).
Product manual BL 4000-C Page 99 of 298
 Loading...
Loading...

