Registers
http://www.motorola.com/computer/literature 2-25
2
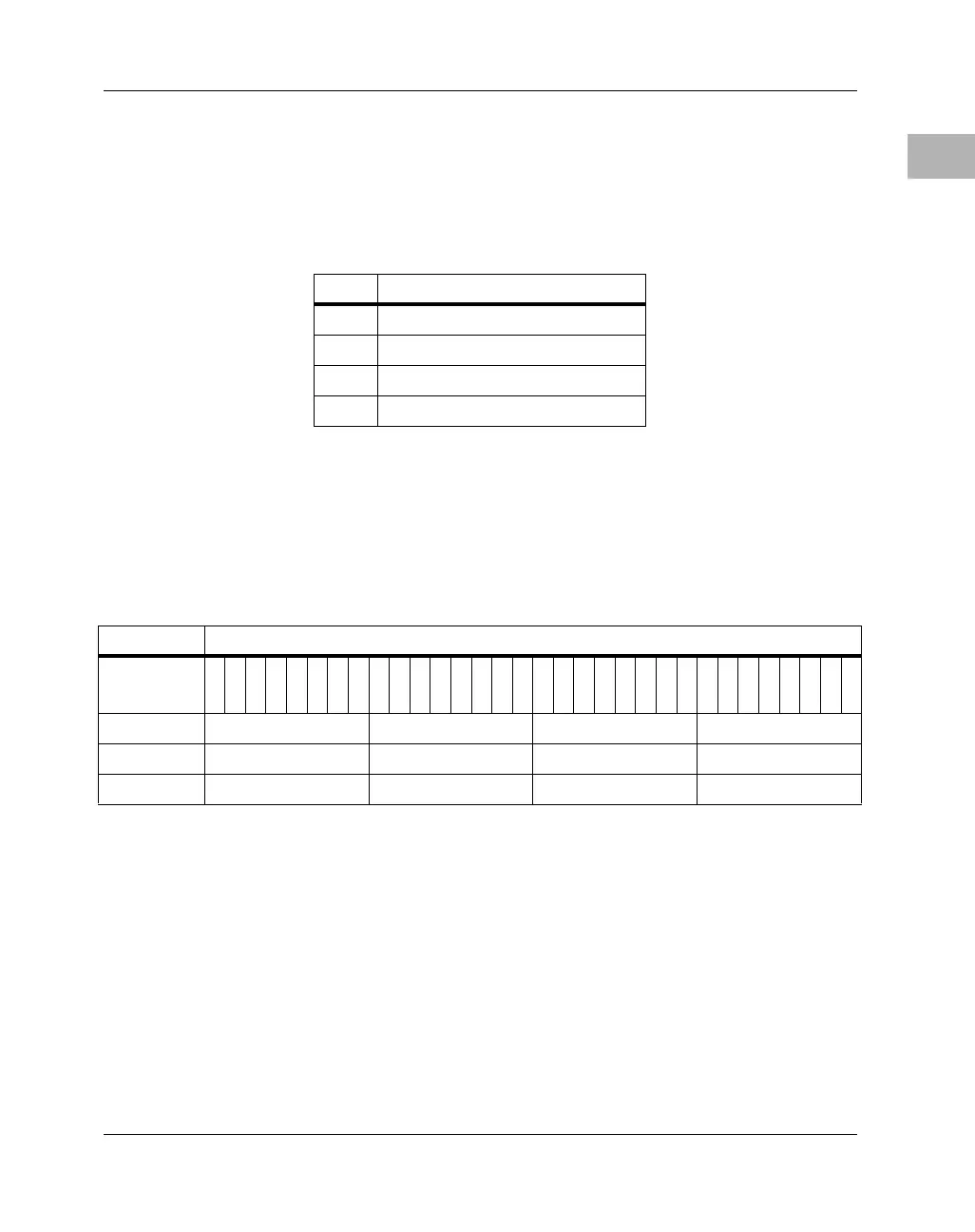
MIDx Master ID. This field is encoded as shown below to indicate who
is currently the PPC bus master. This information is obtained by sampling
the CPUID pins. In a multiprocessor environment, these bits allow
software to determine on which processor it is currently running. The
internal PPC arbiter encodes this field as follows:
FEAT Feature Register. Each bit in this register reflects the state of one
of the external interrupt input pins on the rising edge of RESET*. This
register may be used to report hardware configuration parameters to
system software.
Prescaler Adjust Register
PADJ Prescaler Adjust. This register is used to specify a scale factor for
the prescaler to ensure that the time base for the bus timer is 1 MHz. The
scale factor is calculated as follows:
PADJ = 256 - Clk,
where Clk is the frequency of the CLK input in MHz. The following table
shows the scale factors for some common CLK frequencies.
MID Current PPC Data Bus Master
00 device on ABG0*
01 device on ABG1*
10 device on ABG2
11 Raven
Address $FEFF0010
Bit
0123456789
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
8
2
9
3
0
3
1
Name PADJ
Operation RRRR/W
Reset $00 $00 $00 $BE
 Loading...
Loading...









