4-84 ECODRIVE03 DKC**.040, DKC**.100, DKC**.200 ECODRIVE03 Drive Controllers
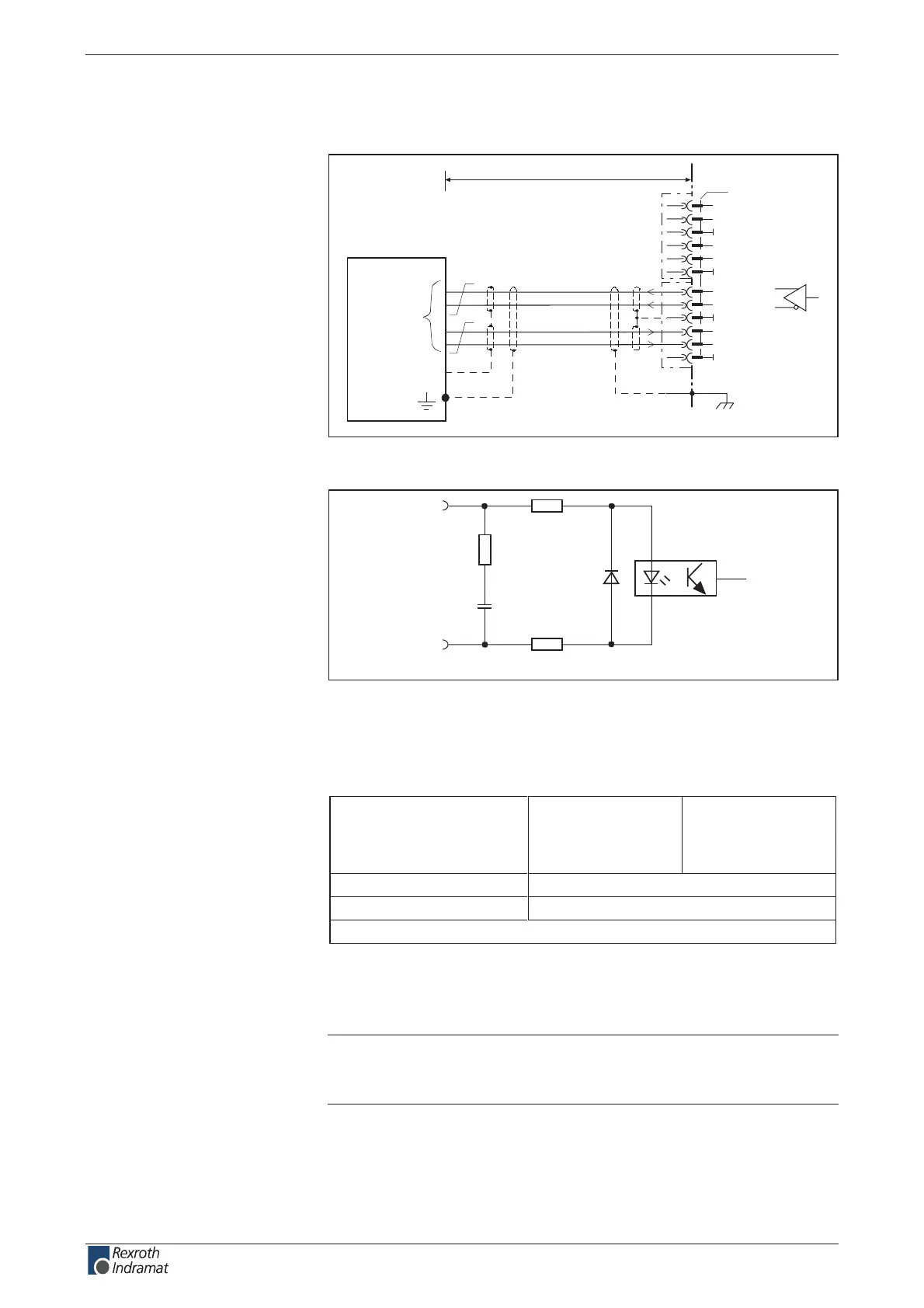
Absolute Encoder Emulation (SSI format)
AP5283F1.FH7
CNC
positioning-
interface
-absolute-
0 V
ext
1
2
3
0V
4
SSIClk-
5
SSIClk+
6
0V
7
SSIData+
8
SSIData-
9
0V
10
11
12
0V
X9
length l
XS3
Fig. 4-129: Output of absolute actual position value in SSI format
Ap5321f1.fh7
R2
SSICLK-
R3
R1
C1
SSICLK+
Schematics
R1: 332R
R2: 100R
R3: 100R
C1: 1nF
Fig. 4-130: Dierential input circuit
Input voltage:
High
Low
min.
2.5 V
0 V
max.
5 V
0.5 V
tiucric eesecnatsiser tupnI
001(ycneuqerf esluP – 1000 kHz)
Polarity protected within allowable input voltage range
Fig. 4-131: Dierential outputs
See "Fig. 4-126:Dierential outputs".
Note: The dierential outputs correspond to RS422 specs.
A termination resistor is required an the controller side, if it is
not present then add an external resistance of 150 - 180 Ohm.
Connection
Absolute Encoder Emulation:
Dierential input circuit
absolute encoder emulation:
Dierential inputs
absolute encoder emulation:
Dierential outputs absolute
encoder emulation:
customerservice@hyperdynesystems.com | (479) 422-0390

 Loading...
Loading...