ECODRIVE03 Drive Controllers ECODRIVE03 DKC**.040, DKC**.100, DKC**.200 4-101
Input voltages
Dierence:
min.
|3| V
max.
|5| V
.nim:tnerruc tupni
|5| mA
max.
|15| mA
zHM 1 .xamycneuqerf elcyc
Fig. 4-171: Dierential inputs
CAUTION
Overloads destroy inputs!
Maximum input current may not be exceeded.
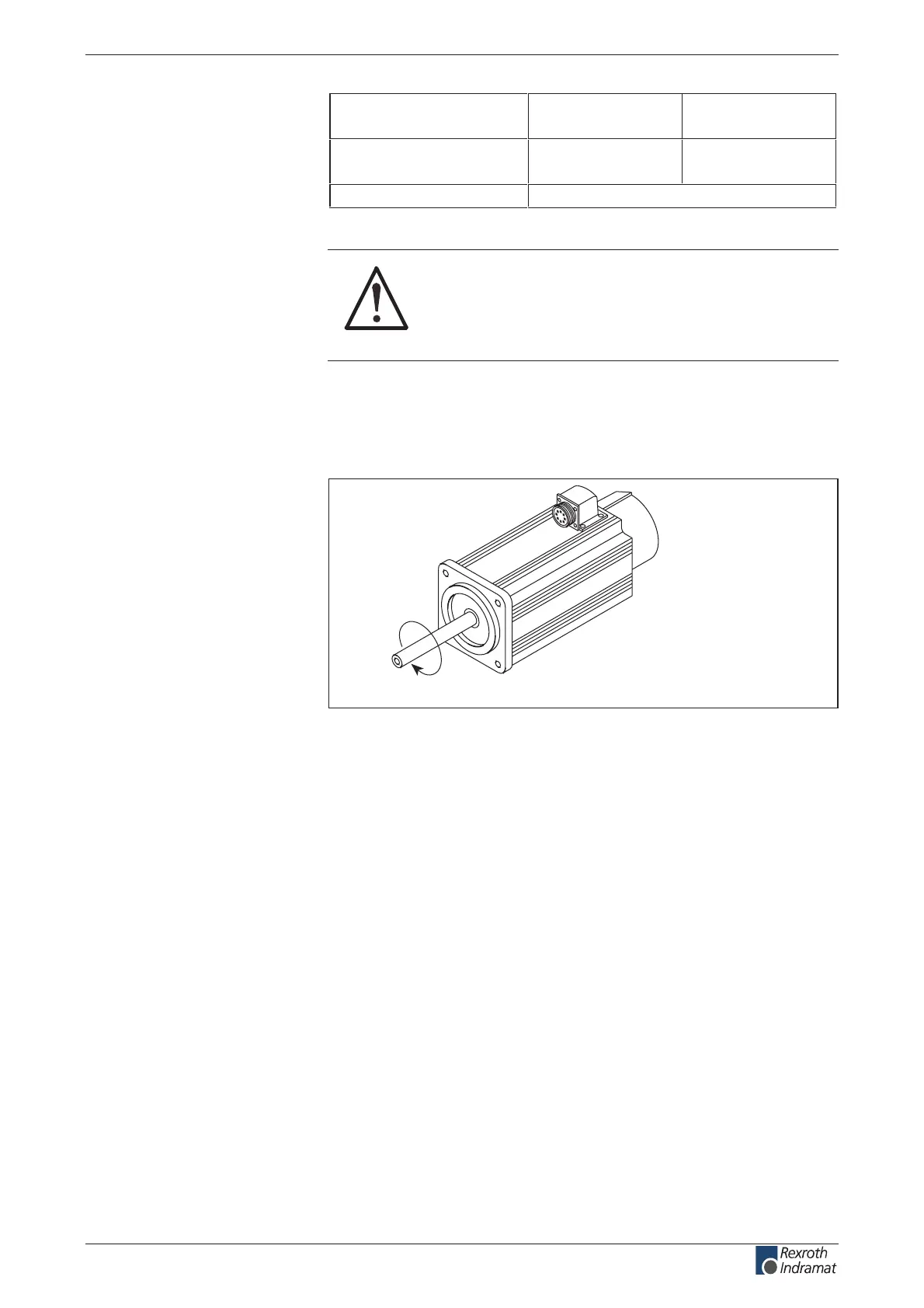
Control inputs for jog mode (Jog+, Jog-)
The axis can be moved positively or negatively in jog mode by using the
jog+ and jog- inputs.
EK5030f1.fh7
Fig. 4-172: Rotational direction with jog+
View from front of the output drive side, arrow indicates positive direction.
Inputs and outputs for positioning block mode
Select leads (binary coded)
Positioning block accept (start), selection to go to zero
Select acknowledge leads (binary code)
Status output
Signal voltages of dierential
inputs:
Jog+, Jog-:
I 0 – I 5:
I 6 – I 7:
Q 0 – Q 5:
Q 6 – Q 9:
customerservice@hyperdynesystems.com | (479) 422-0390

 Loading...
Loading...