PID parameter group 08
PARAMETER DESCRIPTION 139
2. Needs to calibrate the feedback signal
Adjust the feedback signal to a certain value, calculate the ratio of this value to the feedback range, and then
write this ratio value to 08-18 (P.223);
Re-adjust the feedback signal to another value and calculate the ratio of this value to the feedback range, and
then write this ratio value to 08-19 (P.224).
Example 1: Feedback range is 0~10kg
Adjust the feedback signal to 4kg, then write 08-18 (P.223) = (4 / 10) * 100.0 = 40,
Adjust the feedback signal to 6kg, then write 08-19 (P.224) = (6 / 10) * 100.0 = 60.
Note: The user must connect the actual feedback signal for this type of calibration, and must set 08-00 (P.170) = 2
before performing the calibration.
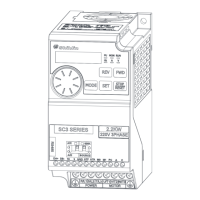
Invert
convertor
Output
frequency
5
3
IM
U/T1
W/T3
V/T2
feedback
quantity
R/L1
S/L2
+
-
Target
value
K
I
=P.173
K
P
=P.172
K
D
=P.174
+
+
+
limit
P.182
PIDmodule
e(t)
Feedback
value
filter
T/L3
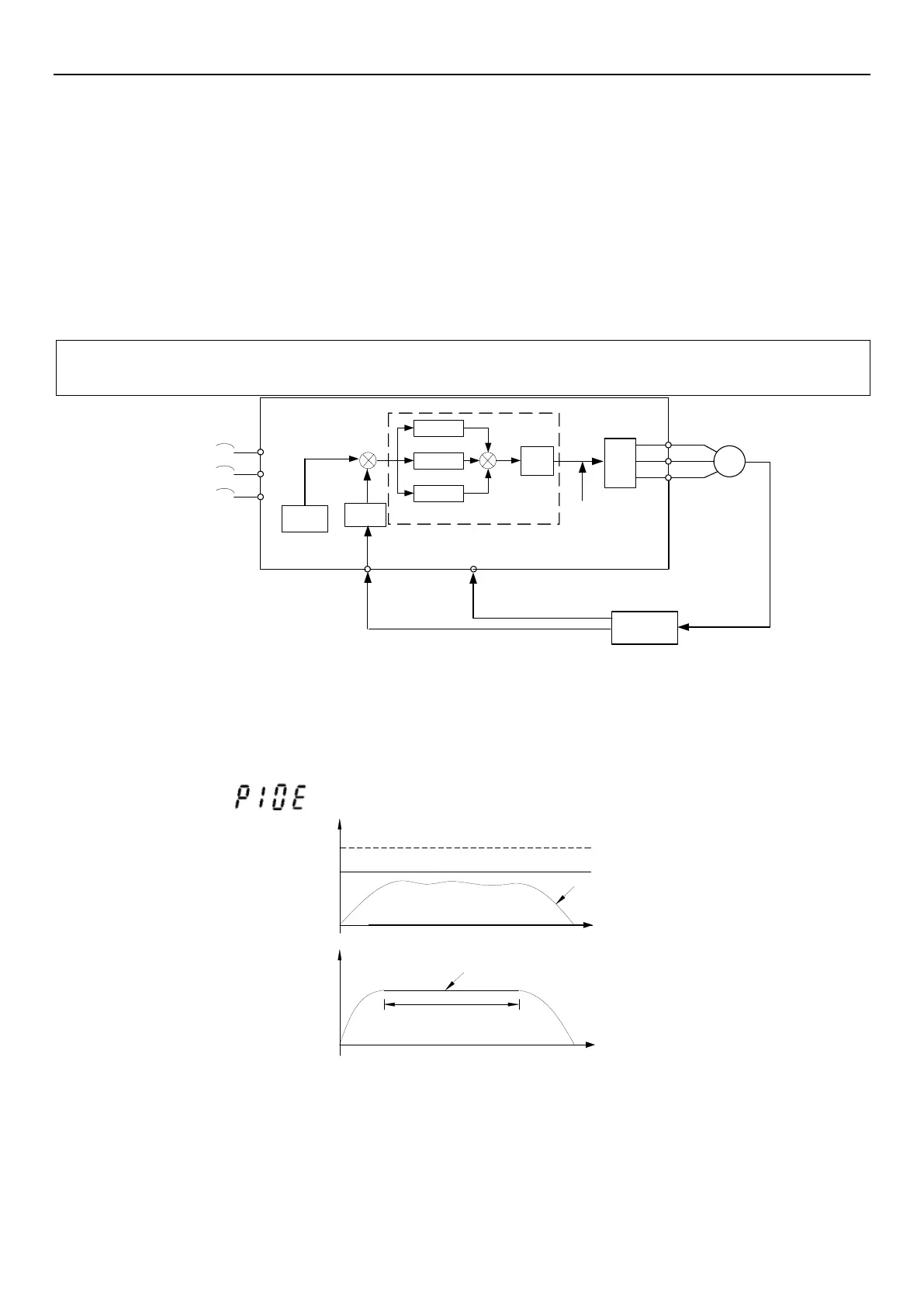
When output frequency reaches 01-03 (P.3) * 08-14 (P.182), the feedback value < target value * 08-07 (P.175),
and the duration exceeds 08-08 (P.176) , PID is considered abnormal, and it will be handled according to 08-09
(P.177) value.
Example: Set 08-07(P.175)=60%, 08-08(P.176)=30s, 08-09(P.177)=0, 01-03(P.3) = 50Hz, 08- 14(P.182)=100%,
when the output frequency reaches 50Hz, the feedback value is lower than 60% of the target value and lasts for
30s, inverter alarms and stops freely.
Target
feedback
value
Feedback
value
Max frequency
08-10
P.176
0Hz
Time
Time
If 08-10 (P.178) is set to 0, then 08-11 (P.179), 08-12 (P.180), 08-13 (P.181), 08-15 (P.183) value is invalid. If the
value of 08-10 (P.178) is not 0, the PID sleep function will be enabled. When the absolute value of the deviation
between the feedback value and the target feedback value is less than the sleep detection deviation and lasts for
08-11 (P.179) sleep detection time, the inverter will gradually reduce the output frequency, when the inverter
output frequency is lower than 08-13 (P.181) stop level, inverter will decelerate to stop. When the feedback value
is lower than the wake-up level, the inverter output frequency is controlled by PID again.

 Loading...
Loading...