3.12 Dimensional Drawings of SGMAH Servomotors (3000 min
-1
)
3-59
3
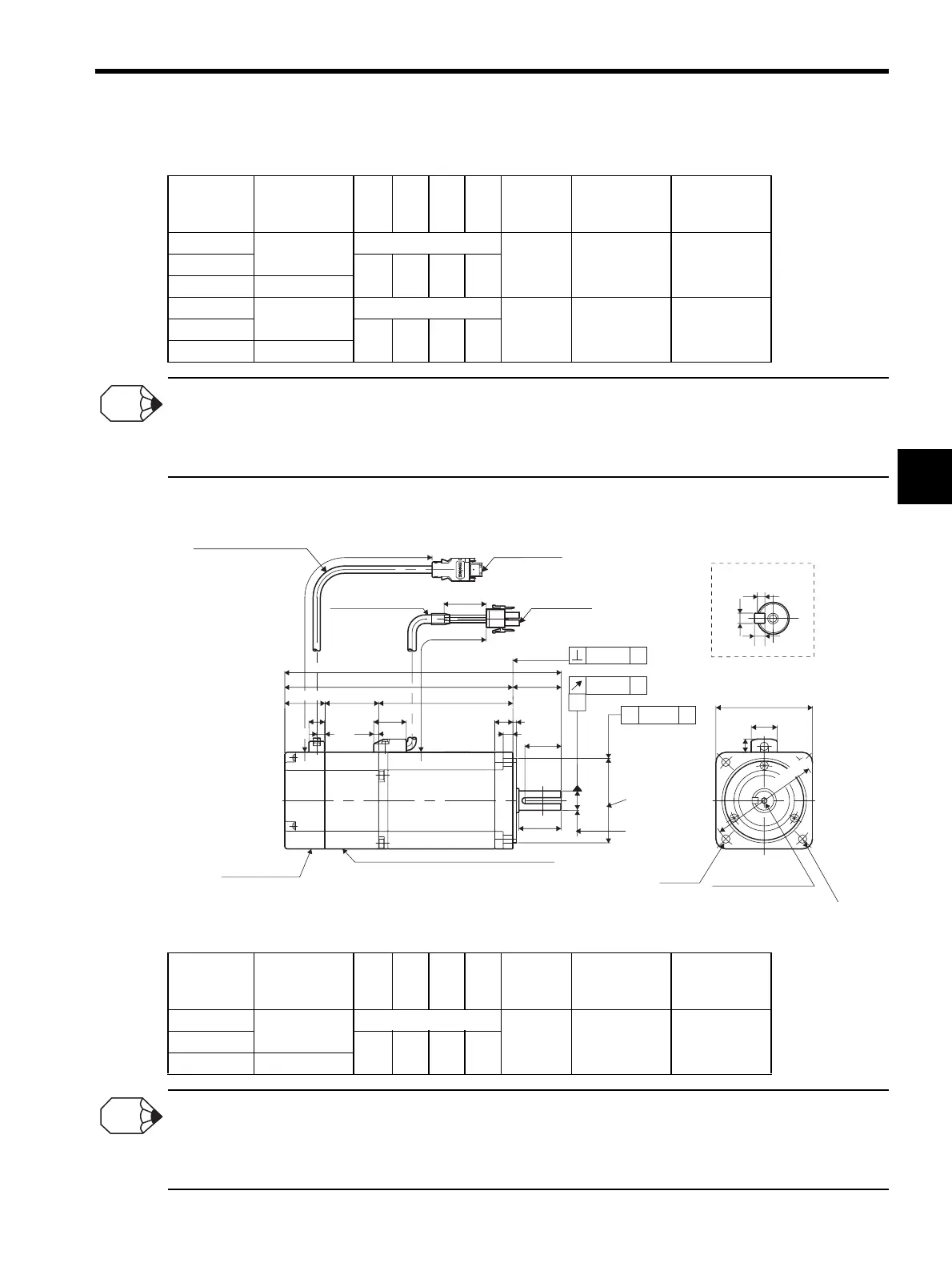
1. The dimensions for L and LL of a servomotor incorporating an encoder with super-capacitor (model: SGMAH-
4) are as shown below.
SGMAH-02 and 04: L-dimension +8.2 mm (0.32 in), LL-dimension +8.2 mm (0.32 in)
2. The working point of the SGMAH servomotor radial load is at the position of minus 5 mm from the shaft end.
(3)
750W
1. The dimensions for L and LL of a servomotor incorporating an encoder with super-capacitor (model: SGMAH-
4) are as shown below.
SGMAH-08: L-dimension + 0 mm, LL-dimension +0 mm
2. The working point of the SGMAH servomotor radial load is at the position of minus 5 mm from the shaft end.
Units: mm (in)
Model
SGMAH-
Tap×
Depth
∗
QK U W T
Approx.
Mass
kg (lb)
Allowable
Radial Load
N (lbf)
Allowable
Thrust Load
N (lbf)
02A2
No tap
No key
1.6
(3.53)
245
(55)
74
(17)
02A4
20
(0.79)
3
(0.12)
5
(0.20)
5
(0.20)
02A6
M5×8L
04AA2
No tap
No key
2.2
(4.85)
245
(55)
74
(17)
04AA4
20
(0.79)
3
(0.12)
5
(0.20)
5
(0.20)
04AA6
M5×8L
INFO
300(11.81)±30(±1.18)
33.5(1.32)
13(0.51)
7(0.28)
44.5(1.75)
27(1.06)
4.5(0.18)
229.5(9.04)
300(11.81)±30(±1.18)
189.5(7.46)
15(0.59)
3(0.12)
8(0.31)
QK
40(1.57)
35(1.38)
Y
Y
111.5(4.39)
㧔35㧕(1.38)
Serial encoder
Holding blake (de-energizing operation)
Power supply: 90 VDC or 24 VDC
φ16h6
φ70h7
80(
3.15)
11
(0.43)
Shaft End
T
U
W
Encoder Cable φ6(φ0.24)
UL20276
Motor cable φ7(φ0.28)
Encoder plug
Motor plug
21.5(0.85)
4
-R8.2(0.32)
φ90(φ3.54)
A0.04
(φ0.0016)
A
A
٧ Aφ0.04
(φ0.0016)
φ16
0
-0.011
φ70
φ2.756
( )
0
-0.030
0
-0.0001
2
φ0.6299
( )
0
-0.00043
Tap
×
Depth
∗
(See the following table.)
4-
φ7
(φ0.28)
0.02
(0.0008)
Units: mm (in)
Model
SGMAH-
Tap×
Depth
∗
QK U W T
Approx.
Mass
kg (lb)
Allowable
Radial Load
N (lbf)
Allowable
Thrust Load
N (lbf)
08AA2
No tap
No key
4.3
(9.48)
392
(88)
147
(33)
08AA4
30
(1.18)
3
(0.12)
5
(0.20)
5
(0.20)
08AA6
M5×8L
INFO
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
 Loading...
Loading...






