8 Operation
8.1.4 Servomotor with Brakes
8-16
8.1.4 Servomotor with Brakes
Holding brake operation of the servomotor with brake can be controlled with the brake interlock output (/BK)
signal of the SERVOPACK.
When checking the brake operation, take advance measures to prevent vibration due to gravity acting on the
machine or external forces. Check the servomotor operation and holding brake operation with the servomotor
separated from the machine. If both operations are correct, connect the servomotor and perform trial operation.
For wiring on a servomotor with brakes and parameter settings, refer to 8.3.4 Setting for Holding Brakes.
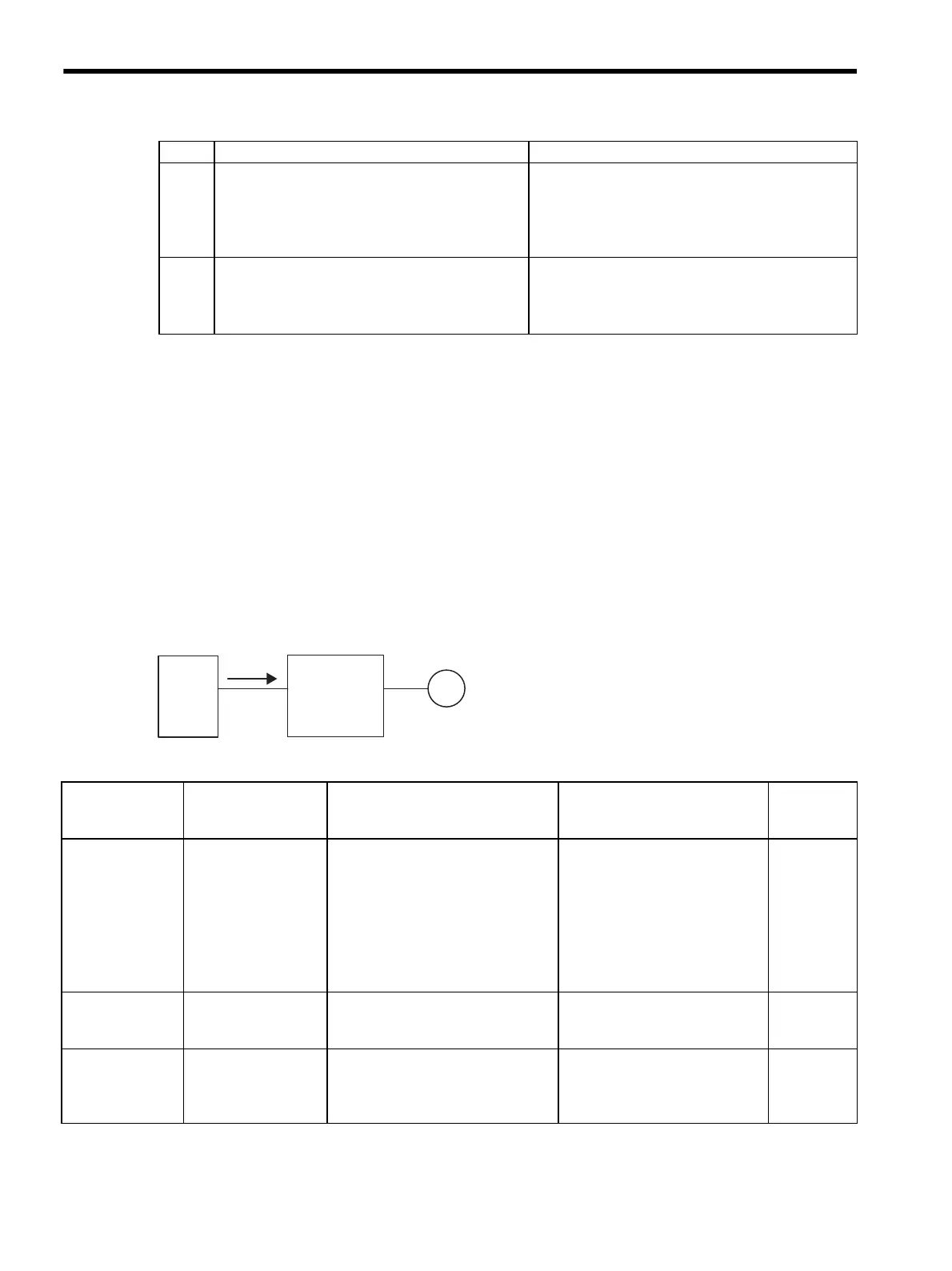
8.1.5 Position Control by Host Controller
As described above, be sure to separate the servomotor and machine before performing trial operation of the ser-
vomotor without a load. Refer to the following table, and check the servomotor operation and specifications in
advance.
7 Adjust the servo gain and improve the servomotor
response characteristics, if necessary.
Refer to 9.1 Autotuning.
The servomotor will not be broken in completely dur-
ing the trial operation. Therefore, let the system run
for a sufficient amount of additional time to ensure that
it is properly broken in.
8 Write the parameters set for maintenance in 12.4
Parameter Recording Table.
Then the trial operation with the servomotor con-
nected to the machine is completed.
−
Step Description Check Method and Remarks
Trial operation for
servomotor without load.
M
Host
controller
Position control Speed control
SERVOPACK
Analog
speed
reference
Reference from
the Host
Controller
Check Item Check Method Review Items
Reference
Section
JOG Operation
(Constant
Reference Speed
Input from
Host Controller)
Motor Speed Check motor speed as follows:
• Use the motor speed monitor
(Un000) on the panel operator.
• Run the servomotor at low speed.
Input a reference speed of 60 min
-1
for example to check to see if the
servomotor makes one revolution
per second.
Check the parameter setting at
Pn300 to see if reference speed
gain is correct.
8.5.1
Simple
Positioning
No. of motor rotation Input a reference equivalent to one
motor rotation and visually check to
see if the shaft makes one revolution.
Check the parameter setting at
Pn201 to see if the number of PG
dividing pulses is correct.
8.5.7
Overtravel
(P-OT and
N-OT Used)
Whether the servomo-
tor stops rotating
when P-OT and N-OT
signals are input
Check to see if the servomotor stops
when P-OT and N-OT signals are
input during continuous servomotor
operation.
Review P-OT and N-OT wiring if
the servomotor does not stop.
8.3.3
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
 Loading...
Loading...






