Chapter 4: AC Drive Parameters
Page 4–125
DURApulse GS4 AC Drive User Manual – 1st Ed, Rev A - 10/20/2017
grouP P6.xx details – Protection ParaMeters
Type Hex Addr Dec Addr
P6.00 Electronic Thermal Overload Relay (Motor 1)
♦R/W 0600 41537
Range/Units (Format: 16-bit binary) Default
0: Constant Torque
1: Variable Torque
2: Inactive
1
The Electronic Thermal Relay Selection is used to prevent a self-cooled motor from overheating
under low speed. This setting limits the drive’s output power.
This parameter determines the drive’s motor overload protection characteristic. The Variable
Torque setting (01) allows less motor current at lower speeds than does the Constant Torque
setting (00).
Related parameter: P6.01
Setting 0: Constant Torque (Recommended for inverter/vector duty motors)
Use this setting when using the GS4 drive
with motors designed specifically for AC drive
outputs, and for running at low speeds with
high currents. Motor currents will be 100%
throughout the speed range, and can be up to
150% for one minute.
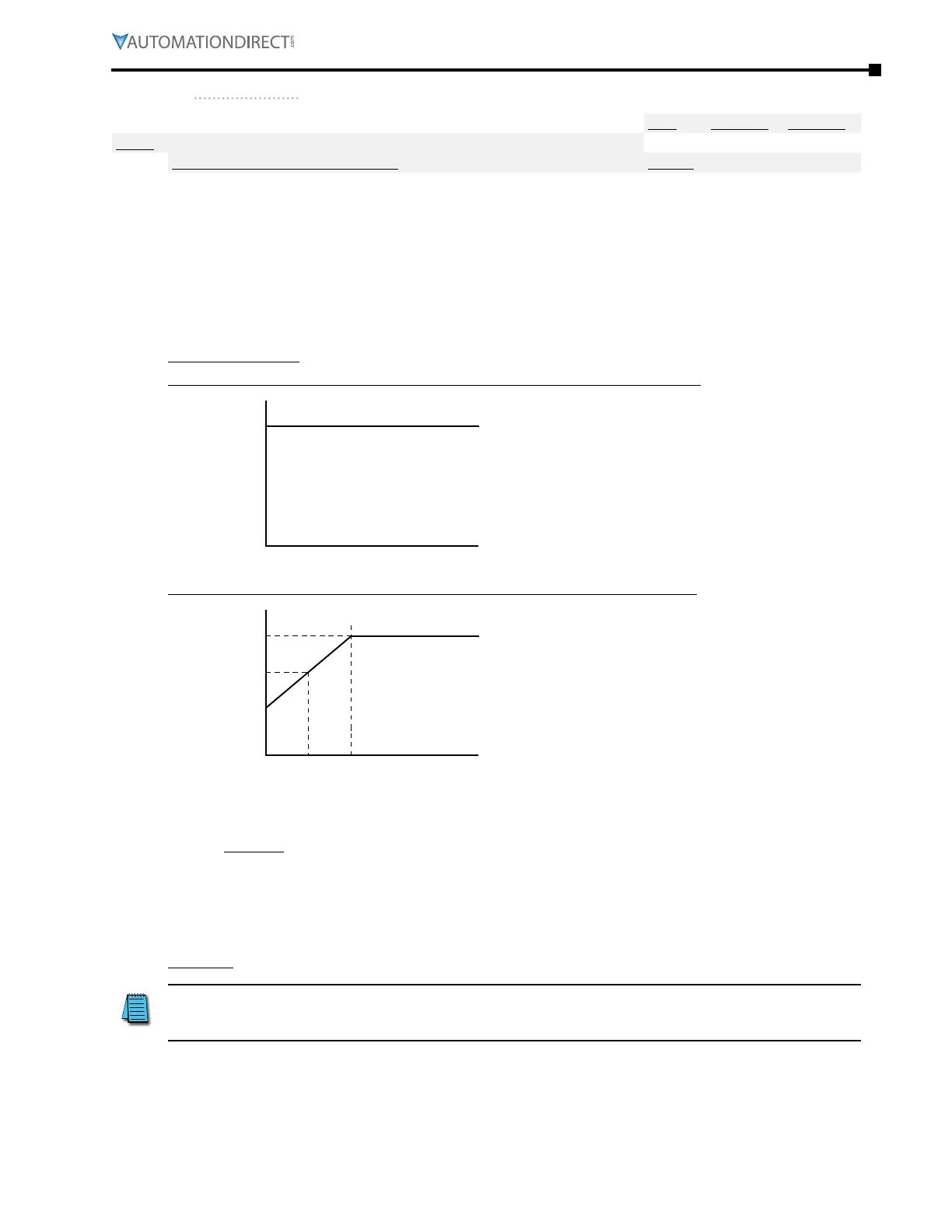
Setting 1: Variable Torque (Recommended for fan-cooled standard motors)
40%
70%
Use this setting when using the GS4 drive with
motors which are NOT designed specifically
for AC drive outputs. Motors with shaft
mounted fans offer poor cooling at low speeds,
therefore the output can be derated at lower
output frequencies. This derated current is for
protecting the motor at lower speeds.
The output current is derated as follows:
•
I
output
(%) = [ ƒ
output
(Hz) x 1�2 %/Hz ] + 40%
Example: If the rated motor current is 10A, and the output frequency is 25Hz, the derating
will be 70%, and the overload will be 10.5A (150%) for one minute:
•
I
output
(%) = [ (25Hz) (1�2 %/Hz) ] + 40% = 70%
•
10A x 70% = 7A
•
7A x 150% = 10�5A
Setting 2: Inactive
NOTE: P6.00/P6.02 (Electronic Overload Relay) must be set independently, yet in conjunction
with P6.33 (Drive Derating Method), and P6.34 (VT/CT Duty Selection).
When P6.34 is set, it can change P2.10 (PWM Carrier Frequency); refer to P2.10.

 Loading...
Loading...
