233
Additional technical information
40. PROPERTIES OF PID CONTROLLERS
A PID controller has a proportional, an integral and a differential portion (P, I and D portion).
40.1. P-portion
Function:
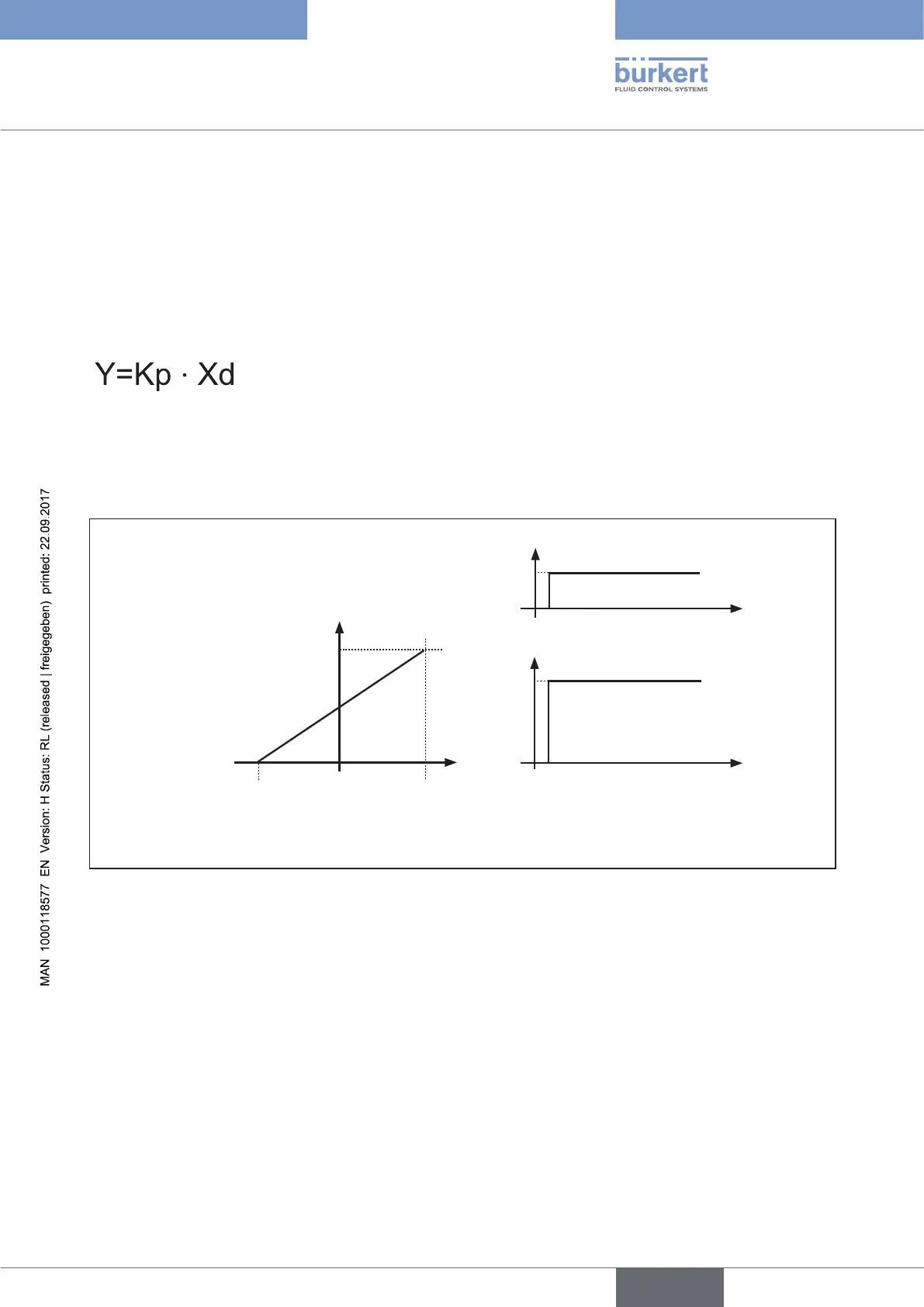
Kp is the proportional coefficient (proportional gain). It is the ratio of the adjusting range ∆Y to the proportional
range ∆Xd.
Characteristic and step response of the P portion of a PID controller
Characteristic
Step response
Xd
X
Ymax
Ymin
Y0
Kp⋅Xd
t
t
Xd
Y
Proportional range ∆Xd
Y
Adjustment
range ∆Y
Figure 133: Characteristic and step response of the P portion of a PID controller
Properties
In theory a pure P-controller functions instantaneously, i.e. it is quick and therefore dynamically favorable. It has a
constant control difference, i.e. it does not fully correct the effects of malfunctions and is therefore statically relatively
unfavorable.