234
Additional technical information
40.2. I-portion
Function:
(5)t d d X
Y
∫
=
Ti is the integral action time or actuating time. It is the time which passes until the actuating variable has run
through the whole adjustment range.
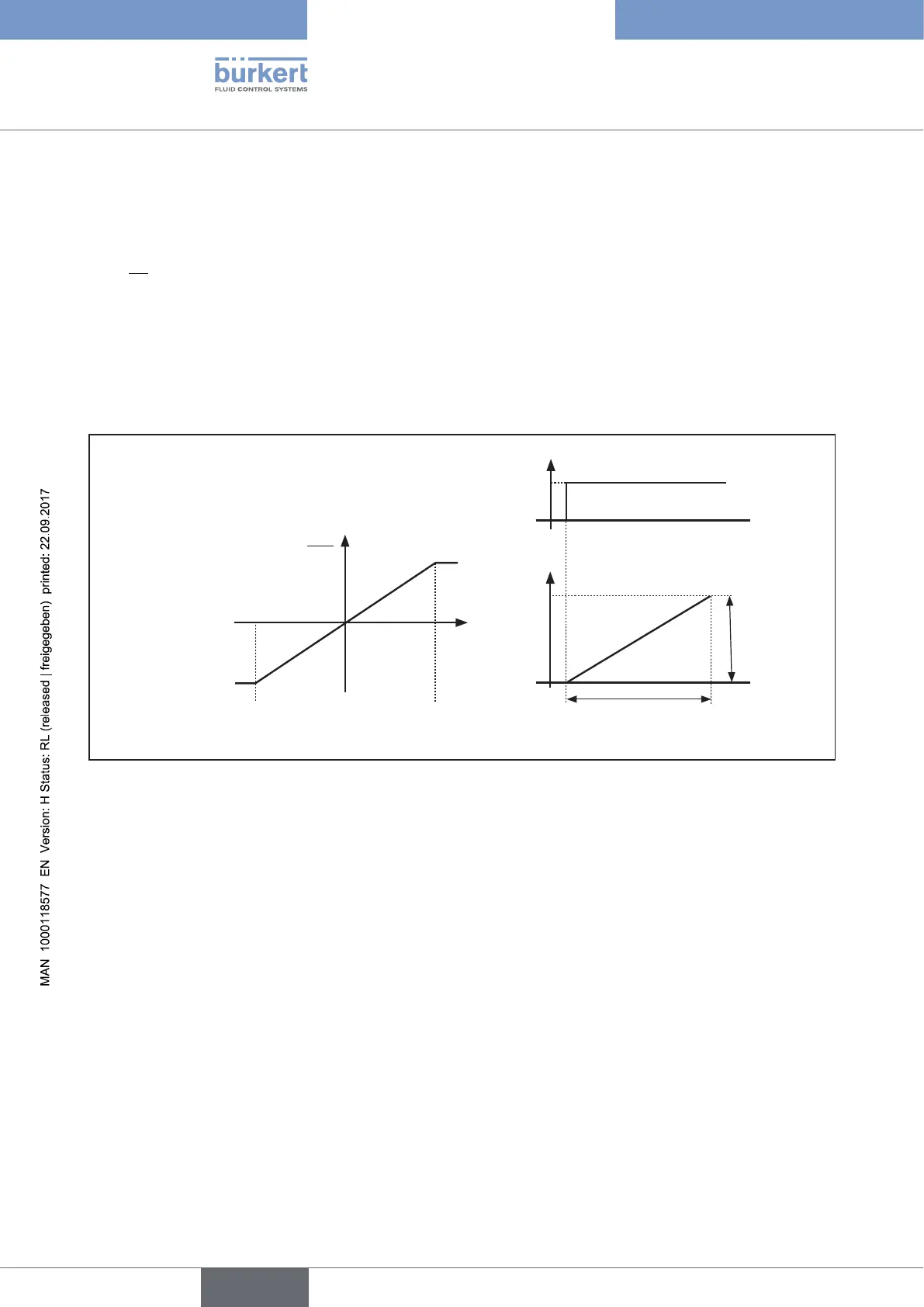
Characteristic and step response of the I portion of a PID controller
Characteristic Step response
X
Xd
Ymax
Ymin
Adjustment
range ∆Y
Xd
dY
dt
Figure 134: Characteristic and step response of the I portion of a PID controller
Properties
A pure I-controller completely eliminates the effects of any malfunctions which occur. It therefore has a favorable
static behavior. On account of its final actuating speed control it operates slower than the P-controller and has a
tendency to oscillate. It is therefore dynamically relatively unfavorable.