236
Additional technical information
40.4. Superposition of P, I and D Portions
Function:
∫
++⋅= (7)
dK t d d X
d XpK Y
Where Kp · Ti = Tn and Kd/Kp = Tv the function of the PID controller is calculated according to the following
equation:
∫
++⋅= (8) )
t d
d X d
v Tt d d X
n T
1
d X (pK Y
Kp Proportional coefficient / proportional gain
Tn Reset time
(Time which is required to obtain an equally large change in the actuating variable by the I portion, as
occurs due to the P portion)
Tv Derivative time
(Time by which a certain actuating variable is reached earlier on account of the D portion than with a
pure P-controller)
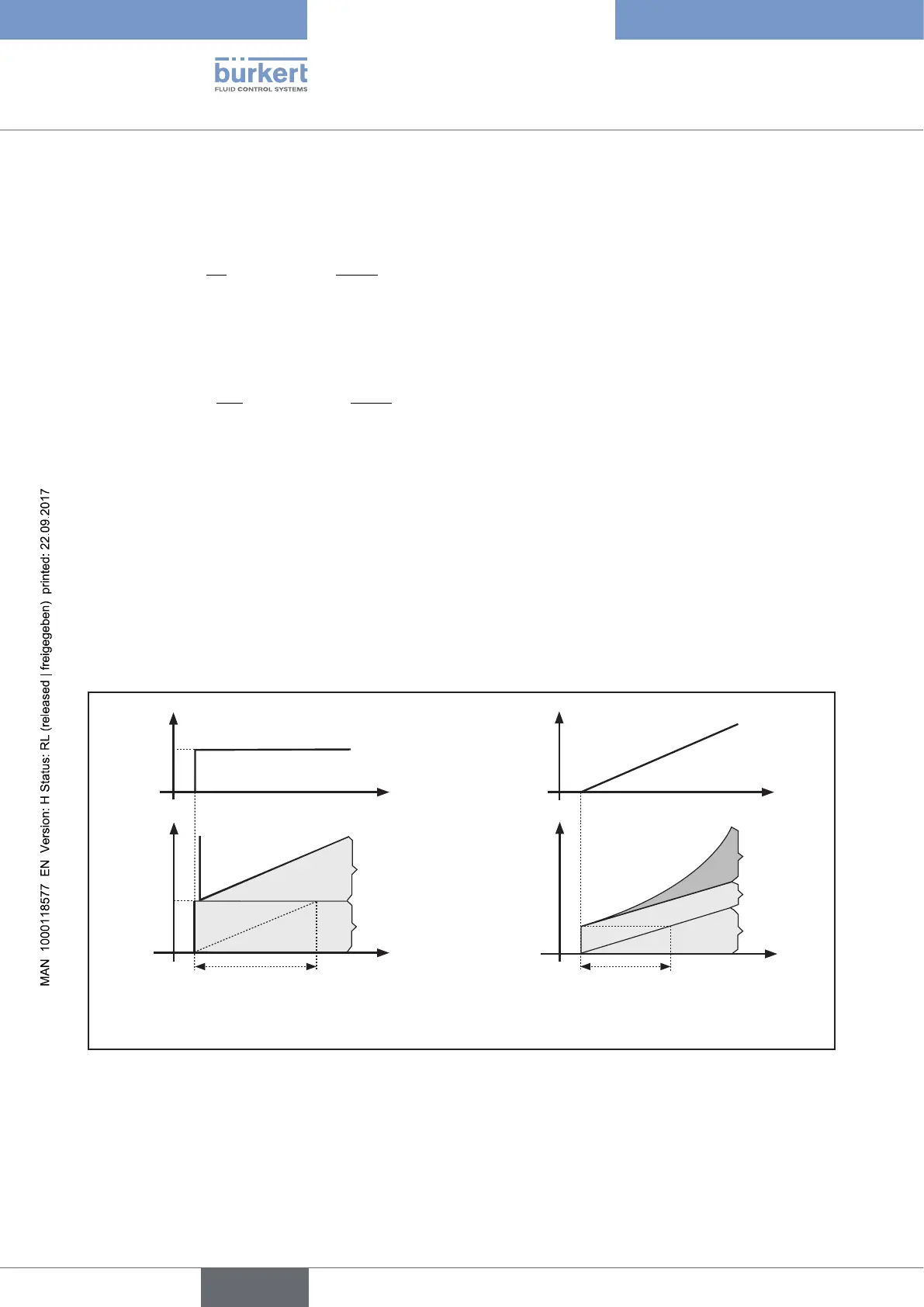
Step response and ramp response of the PID controller
Step response of the PID controller
Ramp response of the PID controller
Xd
X
D-portion
X
Y
I-portion
P-portion
I-portion
P-portion
D-portion
Y
Reset time Tn Hold-back time Tv
Kp⋅Xd
t
t
t
t
Figure 136: Characteristic of step response and ramp response of PID controller