Programming manual.
CNC 8070
KINEMATICS AND COORDINATE TRANSFORMATION
19.
Summary of kinematics related variables.
·359·
(REF: 1709)
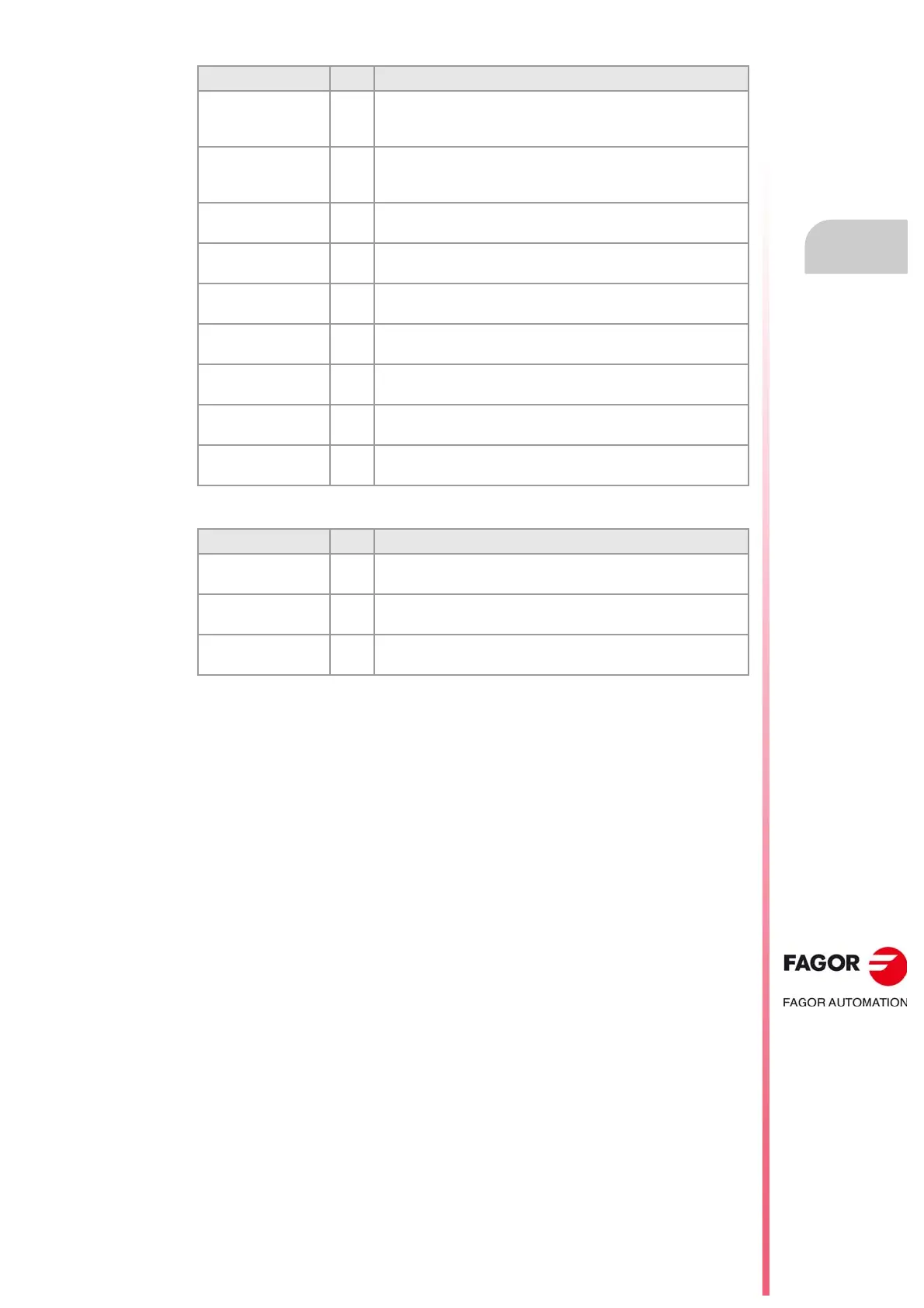
Variables related to the KINORG option (position of the current transformed part zero,
considering the position of the table kinematics).
V.G.CSROTO2[2] R Position (machine coordinates) calculated for the fourth rotary axis
of the kinematics at the end of the block, for solution 2 of the #CSROT
mode.
V.G.CSROTF[1] R/W Position (machine coordinates) to be occupied by the first rotary axis
of the kinematics at the beginning of the block, for the #CSROT
mode.
V.G.CSROTF[2] R/W Position (machine coordinates) to be occupied by the first rotary axis
of the kinematics at the end of the block, for the #CSROT mode.
V.G.CSROTS[1] R/W Position (machine coordinates) of the second rotary axis at the
beginning of the block, for the #CSROT mode.
V.G.CSROTS[2] R/W Position (machine coordinates) to be occupied by the second rotary
axis at the end of the block, for the #CSROT mode.
V.G.CSROTT[1] R/W Position (machine coordinates) to be occupied by the third rotary
axis at the beginning of the block, for the #CSROT mode.
V.G.CSROTT[2] R/W Position (machine coordinates) to be occupied by the third rotary
axis at the end of the block, for the #CSROT mode.
V.G.CSROTO[1] R/W Position (machine coordinates) to be occupied by the fourth rotary
axis at the beginning of the block, for the #CSROT mode.
V.G.CSROTO[2] R/W Position (machine coordinates) to be occupied by the fourth rotary
axis at the end of the block, for the #CSROT mode.
Variable. R/W Meaning.
(V.)[ch.]G.KINORG1 R Position of the part zero transformed by the instruction #KINORG,
considering the table position, on the first axis of the channel.
(V.)[ch.]G.KINORG2 R Position of the part zero transformed by the instruction #KINORG,
considering the table position, on the second axis of the channel.
(V.)[ch.]G.KINORG3 R Position of the part zero transformed by the instruction #KINORG,
considering the table position, on the third axis of the channel.
Variables. R/W Meaning.