User’s Manual INNOMAR Parametric Sub-Bottom Profilers / SESWIN 103
Innomar Technologie GmbH (2023-01) 103
Getting the optimal INNOMAR SBP synchronisation settings
If the water depth and therefore the MBES ping rate changes, the system settings have to be
adapted. In the following the optimal settings for different water depths are shown.
The Reson SeaBat 7125 MBES uses a swath of about 130° (±65° in single head configuration).
Assuming a flat seafloor at about 100 m water depth, MBES bottom return would be received
about 120 – 350 ms after pinging (taking ±10% water depth variation into account). The ping rate
of the MBES, that will trigger the INNOMAR SBP, can be assumed to be about 2.7 Hz (370 ms).
The range that should be avoided by the SBP HF bottom return is limited to the near-nadir MBES
beams (let’s say ±30°): 120 – 70 ms. The bottom return of the INNOMAR system can be expected
in the range of 120 – 150 ms after pinging.
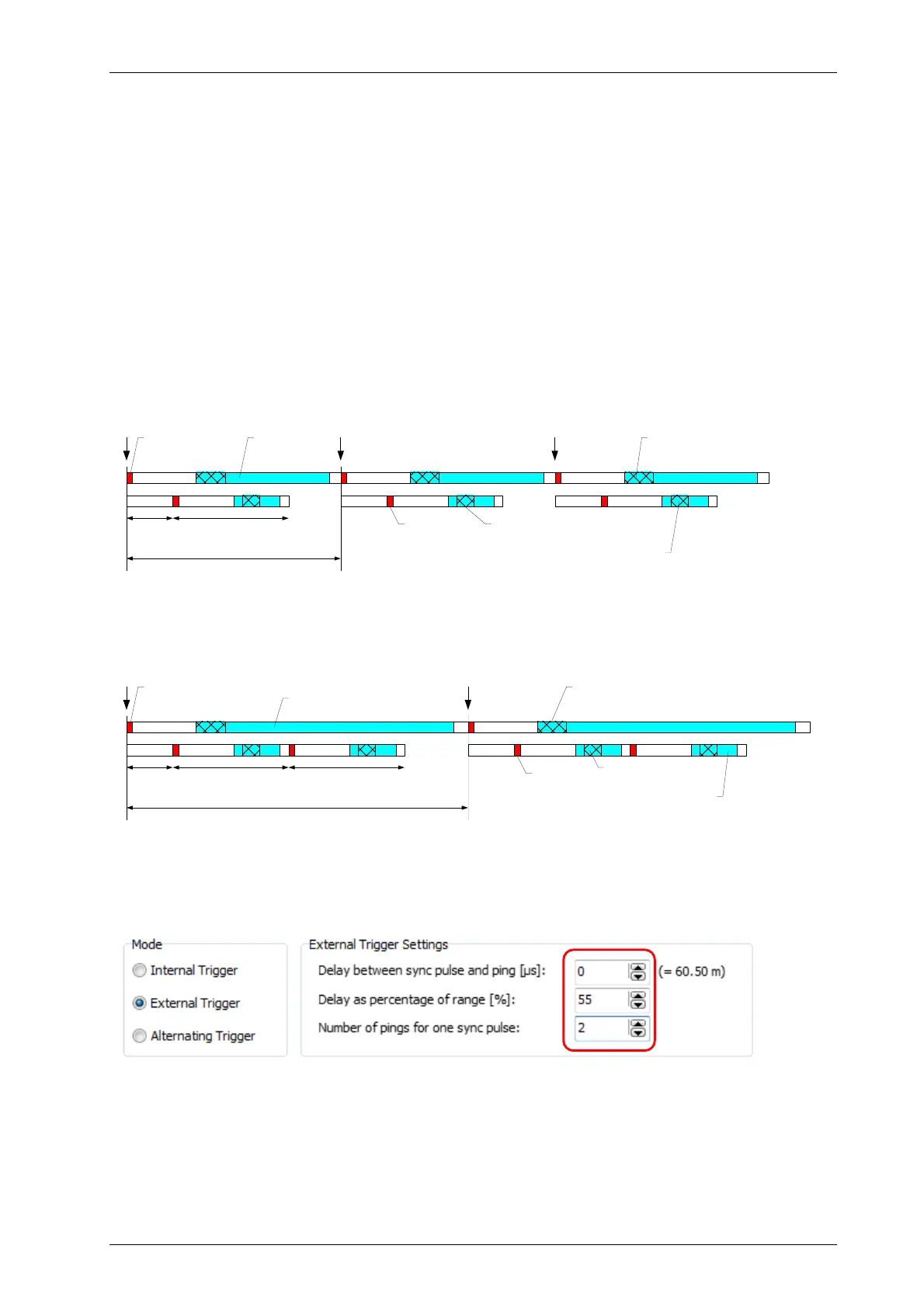
The best moment for the INNOMAR SBP to transmit its sound ping would be about 50 – 75% of
the time of MBES centre beam bottom return. In the example a INNOMAR trigger delay of 66%
(80 ms) was chosen.
With a range start of 80 m and a range length of 60 m we’ll cover a possible sediment penetration
of at least 30 m and get a ping rate of about 5 Hz (200 ms) for the INNOMAR SBP.
If the MBES would use a swath of about 150° (±75°) or if the MBES would be set to a longer
range, two SBP pulses plus delay would fit within one MBES cycle assuming same conditions as
above. This is shown in the picture below.
The effective swath is increased as well if the MBES is tilted, e.g. in dual-head configurations.
Delay and burst settings are made in the “External Trigger Settings” within the “System Setup –
Settings – General – Synchronisation” tab, see figure.
Please note that the delay can be given absolutely in microseconds and/or relative to range. Both
values will be added to get the total delay. There will be an additional delay of about 1ms for
external trigger applied by the system, see section 6.2.2 on page 83 for details.
Absolute (time based) delay is useful if transducer altitude above seafloor will not change during
the survey like in ROV applications. In this case the interference caused by the SBP will be placed
at a determined MBES range.
80ms 200ms
370ms
MBES Ping /
Trigger Event
SES Ping SES Bottom Return
MBES Bottom
Return
SES Data Acquisition Range
Range to be avoided by the
SES ping and bottom return
80ms 200ms
590ms
MBES Ping /
Trigger Event
SES Ping
MBES Bottom Return
Range to be avoided by the
SES ping and bottom return
SES Bottom Return
SES Data Acquisition Range
200ms
 Loading...
Loading...