22 User’s Manual INNOMAR Parametric Sub-Bottom Profilers / SESWIN
22 Innomar Technologie GmbH (2023-01)
2.8 SESWIN Survey Settings
All settings outlined below will affect the data quality
and cannot be changed in post-processing. For the
“Home” menu please see section 5.9 on pages 46 ff.
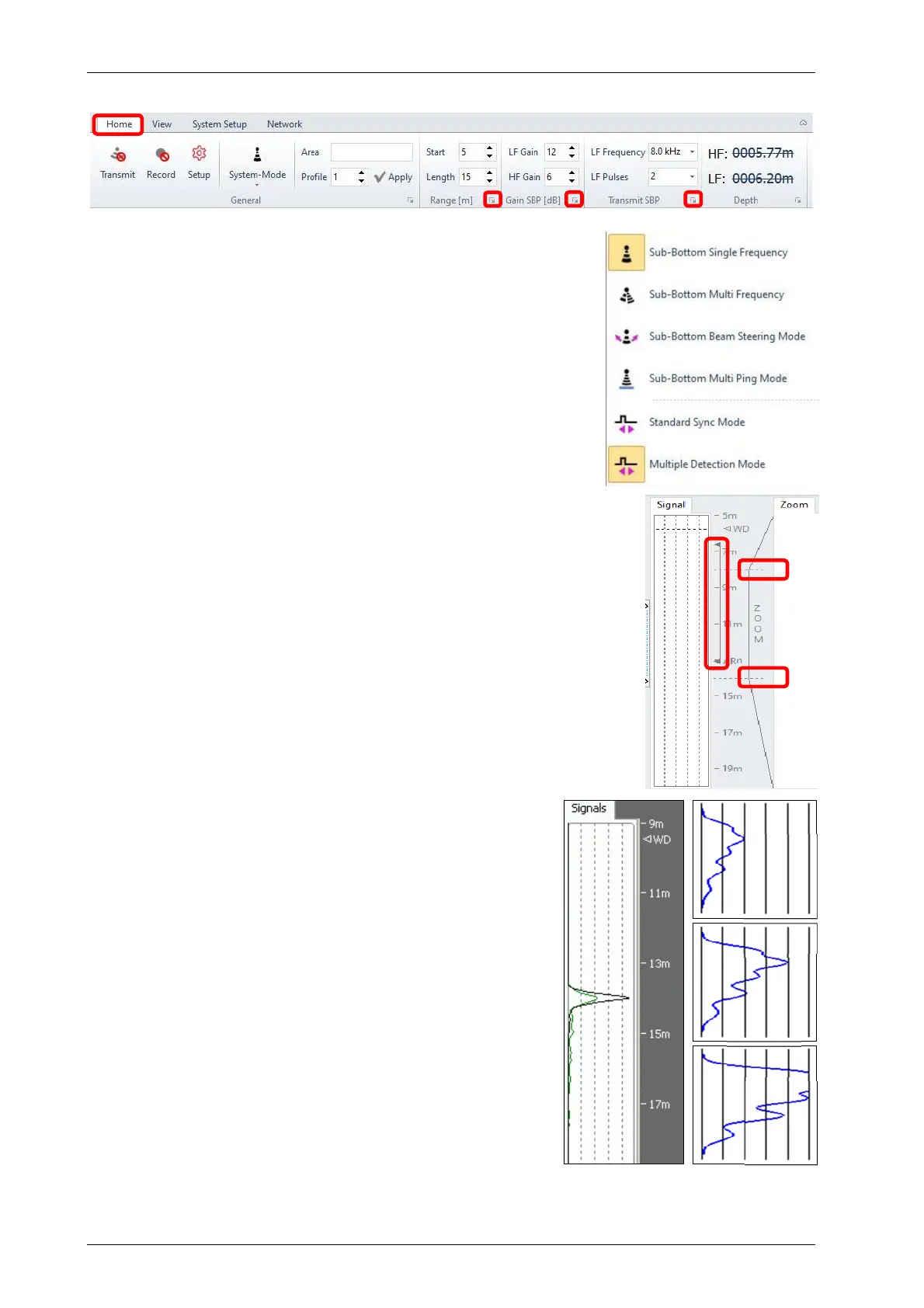
Transmitter Settings
System Mode (1)
o Usually “sub-bottom single frequency” or “sub-bottom
multi ping mode” (in deep waters with internal trigger)
Ping Rate (2)
o Keep as high as possible (system controlled)
LF centre frequency (3)
o Start at middle of range and refine; higher frequencies
for better resolution; lower frequencies for better
penetration (but more noise and less resolution)
LF pulse length (4)
o Number of cycles of centre frequency, start with “2”
and refine; lower values improve resolution, higher
values improve signal-to-noise ratio
HF power (System Setup > General > System)
o Keep at 100% (the HF level directly affects the LF
level and thus penetration: HF -3 dB LF -6 dB)
o Soft start for marine mammal protection
o Not to be mixed up with the “HF Gain” setting
Trigger / Synchronisation
o Internal highest ping rate
o External triggered from MBES to reduce acoustic
interference; no multi-ping mode available
Receiver Settings
Range Start and Length (5)
o Set range length to expected / required penetration,
keep as short as possible (e.g. 20 m)
o Adapt range start to water depth (also automatic
mode possible, thresholds shown in ruler (6))
o Use handles to adapt zoom (7)
HF & LF Gain (8)
o Adapt to signal strength c. 80% full scale (9)
(LF: green, HF: black) use almost the full range,
but avoid saturation
o Values will vary with water depth, seabed type and
seabed shape (slopes) and need to be adapted
o Negative gain (attenuation) possible
o Automatic mode available (10)
(1)
(1)
(3)
(4)
(2)
(5)
(8)
(6)
(7)
(10)
(6)
(7)
(9)
(9)