User’s Manual INNOMAR Parametric Sub-Bottom Profilers / SESWIN 161
Innomar Technologie GmbH (2023-01) 161
13.4 Motion Sensor / Motion (Heave/Roll/Pitch) Compensation
13.4.1 Do I need a motion sensor?
Q1: What is a motion sensor and what is it used for?
Q2: I do not have a motion sensor yet; do I need one?
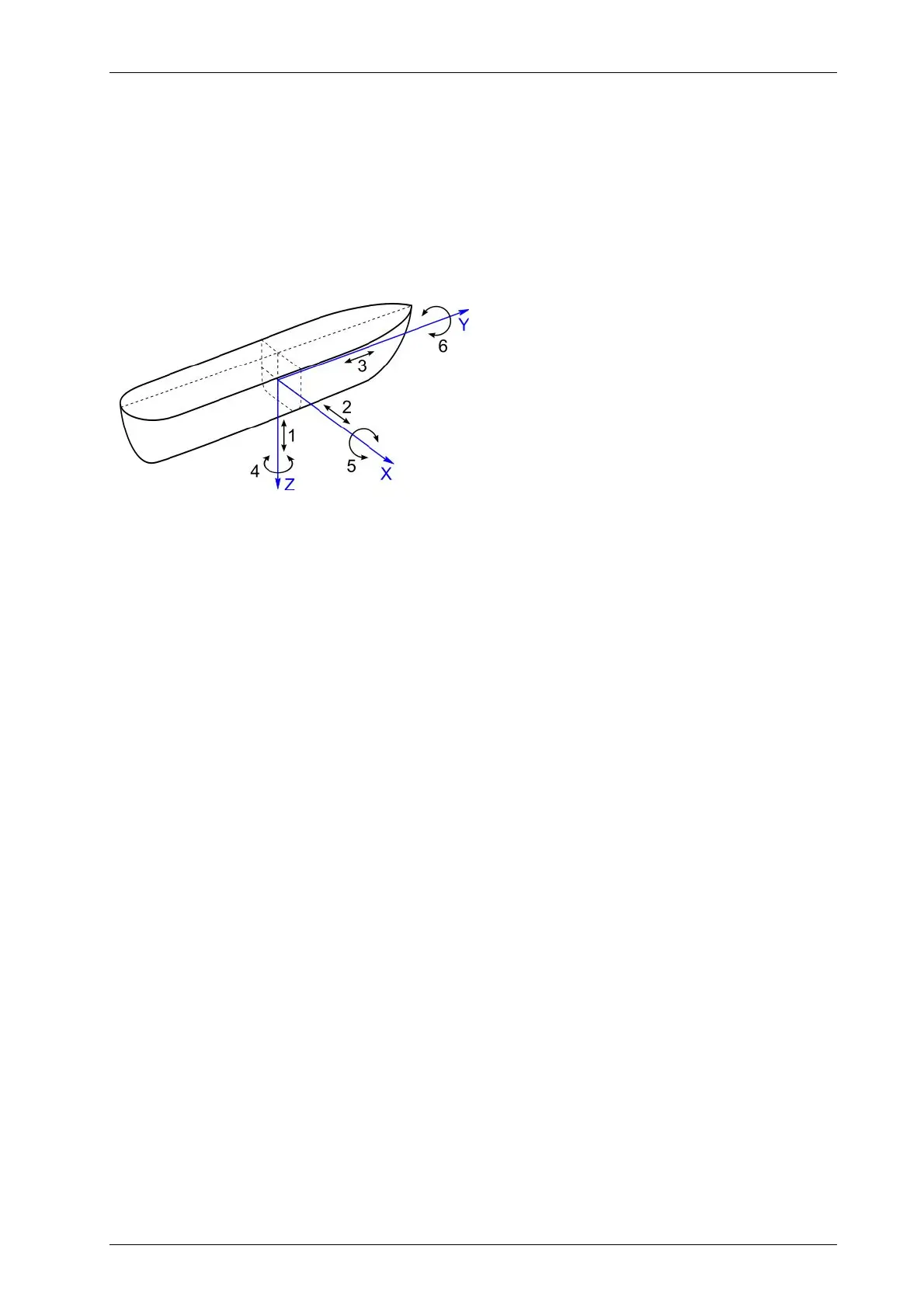
The position and orientation of a rigid body in space (like a vessel afloat in water) is defined by
three components of translation and three components of rotation, which means that it has six
degrees of freedom. For vessels, usually the centre of gravity is considered to be the centre of
rotation.
Translation:
1. Heave: moving up and down
2. Sway: moving left and right
3. Surge: moving forward and backward
Rotation:
4. Yaw: swivel left and right
5. Pitch: tilt forward and backward
6. Roll: pivot side to side
In case of operating an SBP, the motion components affecting data quality are (in decreasing
order): heave (up and down, H), roll (pivoting side to side, R) and pitch (tilt forward/backward, P).
To improve data quality the motion effects can be corrected if the components are known. For
this the components are measured by a motion sensor, which is sometimes also called HRP (or
RPH) sensor.
All INNOMAR SBP models feature heave compensation. Active roll compensation is possible with
the “standard” and “medium” models. Active pitch compensation is optionally available with the
INNOMAR deep-water SBP models only. “Active” roll/pitch compensation means actively changing
the direction of the transmitted (and received) sound ping to compensate the vessel’s rotation
(beam stabilization). Passive roll/pitch compensation in post-processing is possible with all
INNOMAR SBP models.
It is strongly recommended to use and connect a motion sensor to the INNOMAR SBP topside unit,
see section 7.5 on page 98.
13.4.2 Is a motion sensor included in the Innomar SBP?
Q: My INNOMAR SBP features heave and roll compensation. Is a motion sensor integrated
in the unit or part of the delivered package?
No, there is no motion sensor integrated within the INNOMAR SBP, nor included within the
standard delivery. A motion sensor can be included as paid option into the delivery.
13.4.3 What does “beam steering” or “beam stabilization” mean?
Q1: My INNOMAR SBP features “beam stabilization”. What does this mean?
Q2: What is the difference between “beam steering” and “beam stabilization”?
Normally a transducer transmits a sound ping (beam) perpendicular to the transducer surface.
“Beam steering” means the capability to actively change the direction of the transmitted sound
beam. This can be used for directing the sound ping towards slopes to improve data quality.
“Beam stabilization” means compensating the vessel’s rotation due to the sea state (waves) by
changing the direction of the transmitted sound ping to have a vertical beam for optimal data
quality. For this the rotation angle(s) have to be known from a motion sensor, see above.