User’s Manual INNOMAR Parametric Sub-Bottom Profilers / SESWIN 141
Innomar Technologie GmbH (2023-01) 141
12 Data Acquisition and Post-Processing Workflow
This chapter outlines a typical workflow for a geological SBP survey, like a pipe/cable route
survey to determine the thickness of the top sediment layer. Both, data acquisition and post-
processing of the acquired data set is covered. This chapter is not intended to replace a training
course, but should give an overview on the steps necessary to ensure good data quality.
12.1 Survey preparation and survey line planning
For a proper survey planning it is necessary to know the location and size of the area to be
surveyed. Based on this one has to choose a suitable vessel which meets the requirements to
conduct a safe survey, especially in open water with fast changing weather conditions. It is also
important to select additional sensors like motion sensor ore tidal observation systems and to
ensure a suitable power supply.
For a systematic survey, run lines should be planned to cover the area. Line spacing depends on
the expected seabed variability and the client requirements. Spacing should be chosen to get the
data density to meet all requirements. Cross lines should be done for quality assurance. The
spacing of these cross lines can be much larger than the regular run lines. Based on the line
planning and mean survey speed the time consumption can be estimated.
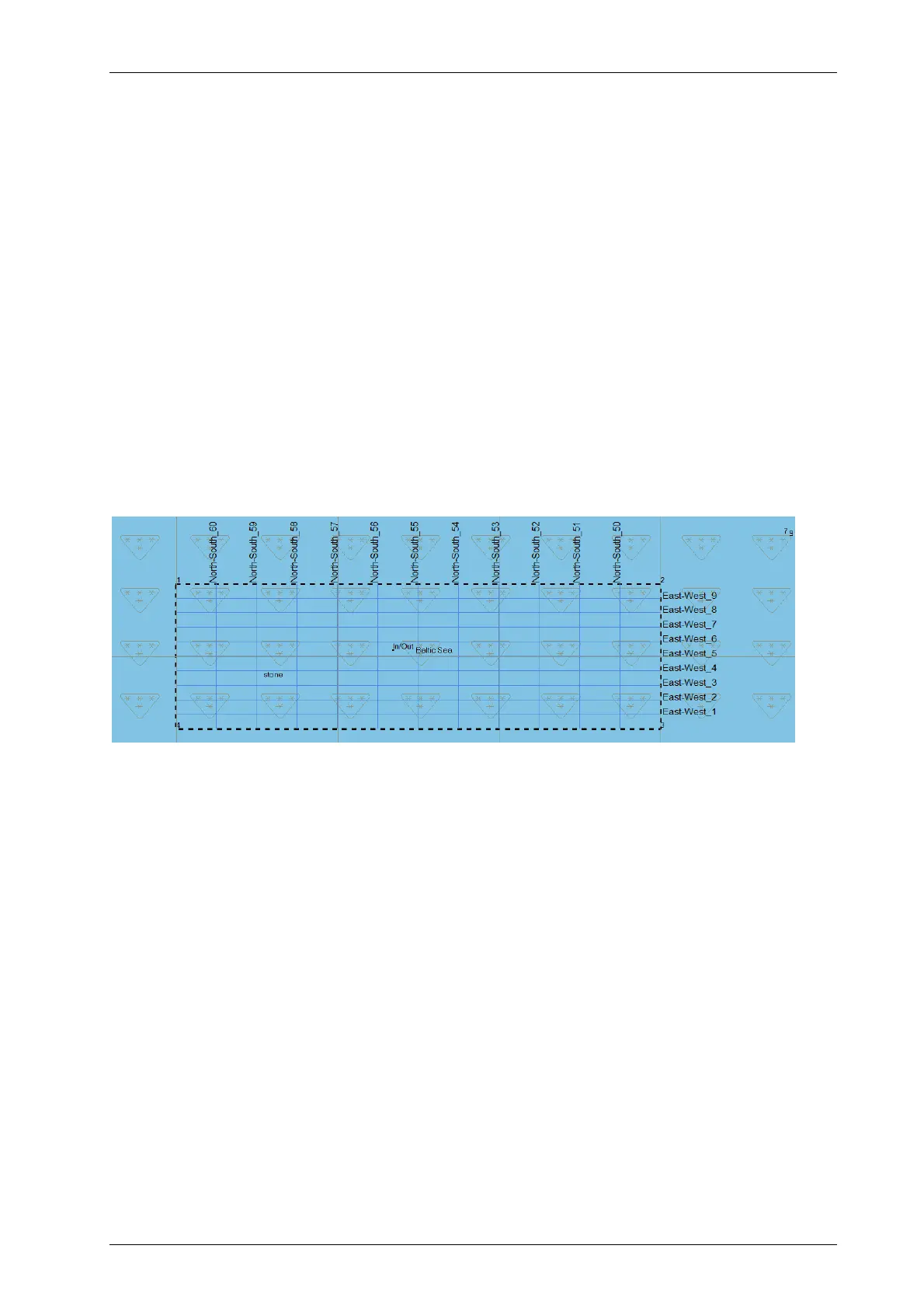
Example for a line planning using HYPACK
®
software, different line spacing for long and cross lines.
12.2 System setup and mobilisation
Before survey starts the INNOMAR SBP and all sensors have to be mobilised aboard the survey
vessel:
SBP topside unit: Needs to be placed in dry environment. Make sure no fan or any
cooling slots are blocked and there is enough space for air circulation. Connect
keyboard, mouse and monitor. Make sure to have a proper power supply.
SBP transducer: The transducer is either hull-mounted or mounted over the side with a
bracket and pole. Make sure the transducer is properly mounted onto a rigid frame or
pole and avoid any vibrations of the mounting structure. The transducer face needs to
be horizontal (inclination less than 0.5 degrees). Note the transducer draught. Use a
separate ground wire from the transducer to the topside unit.
GNSS system: Make sure GNSS position accuracy meets the survey requirements.
Motion sensor: Used to compensate the wave-induced heave movements, it will
improve the accuracy of the soundings. Depending on the SBP model, there might be
also a roll and/or pitch movement compensation available.
Survey software: Used to guide the skipper along the pre-planned run lines.