User’s Manual INNOMAR Parametric Sub-Bottom Profilers / SESWIN 59
Innomar Technologie GmbH (2023-01) 59
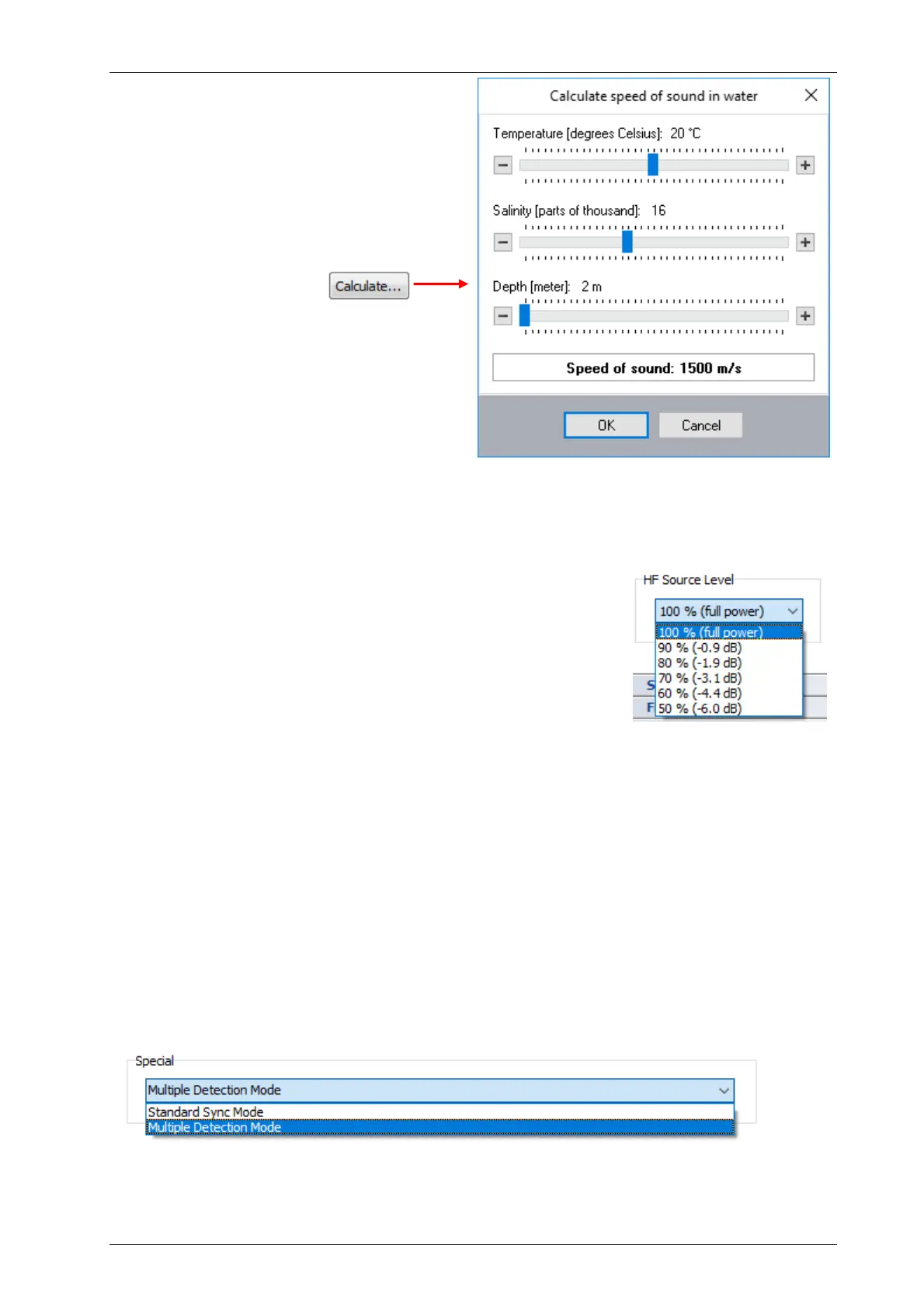
Sound Velocity in Water: The measured or
estimated sound speed is used for the travel
time to depth conversion within SESWIN and
has thus to be set properly. The SESWIN
software can calculate water sound velocity
depending on salinity, temperature and
depth:
See also section 7.2 on page 90.
Signal Source (optional, not shown in the screenshot above): either the transducer (default) or
optionally an external signal fed to the Innomar SBP topside unit via the “Analogue Input” BNC
connector.
HF Source Level: For some models the source level for the
primary frequencies can be decreased to reduce reverberation in
extremely shallow water.
!
Be aware that a reduced primary (HF) source level will heavily
affect the LF sound pressure level and hence the penetration
(50% HF will result in 25% LF only). Thus, this feature should
be used with care.
!
This feature can be used to manually ramp up the transmit power as sometimes required
by authorities to protect marine mammals. For some models there are predefine “soft-start”
(power ramp-up) modes in this drop-down list, which may fulfil the marine mammal
protection requirements.
SBP HF Receiver Channel (optional): Sets what frequency is used for the high-frequency SBP
data channel: The Primary High Frequency (e.g. 100 kHz for the shallow-water models; default)
or its first harmonic, the Secondary High Frequency (e.g. 200 kHz).
!
This will change the receiver settings only; the transmitted frequency is not affected and
remains to the value given in the specs for the used SBP model.
For the “smart” model there is an additional item to replace the missing “System Mode” section
within the Home menu: