Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 106 of 909
starts, P (Position) is reset to zero in preparation for building up again. P is buffered, so it will
not do anything until the G command is issued.
The SmartMotor has a wealth of data that can be retrieved over the Combitronic, RS-232 and
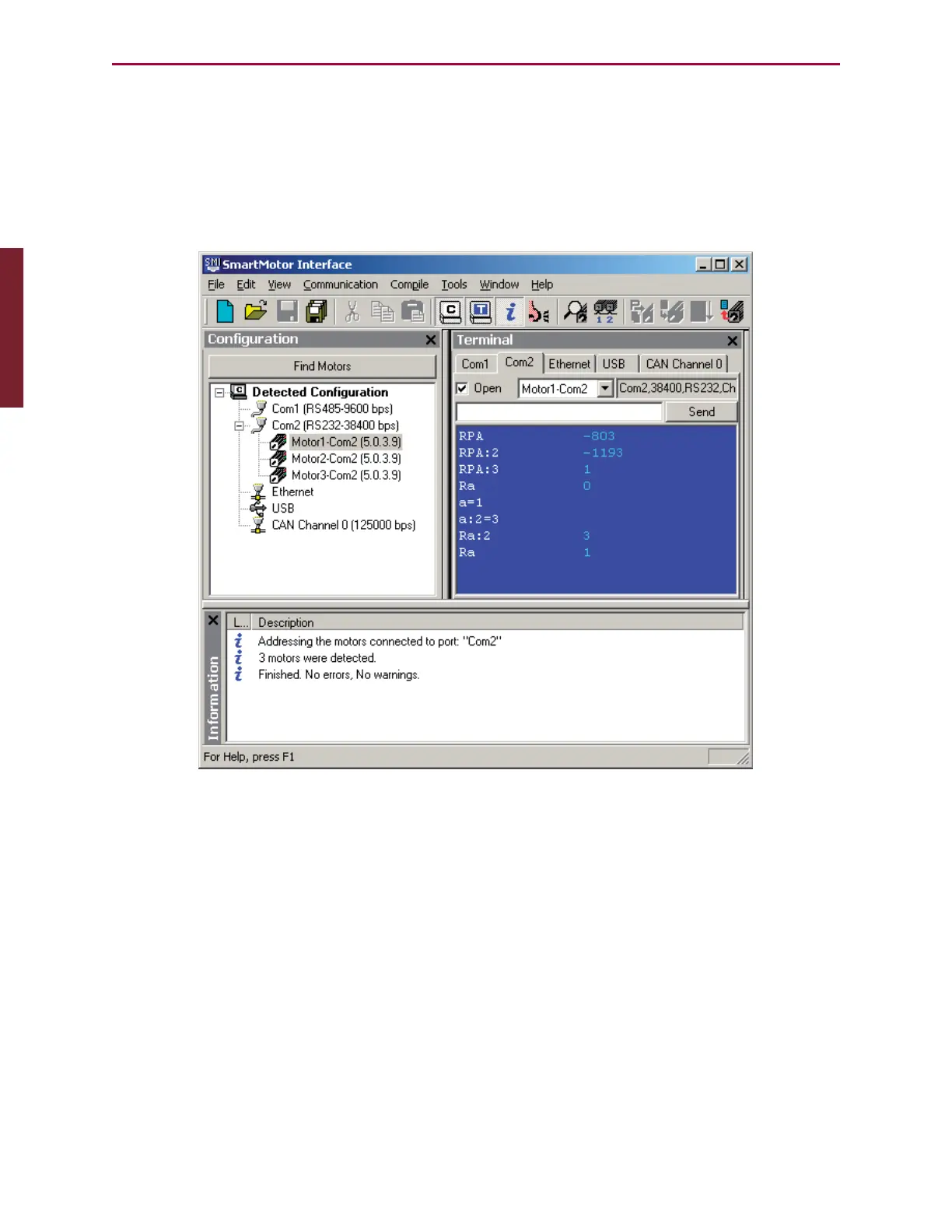
RS-485 ports simply by asking. Data and status reporting commands can be tested by issuing
these report commands from any hosting application. Using SMI Terminal window as the host
(see the following figure), the command is shown on the left and the SmartMotor's response is
shown in the middle.
SmartMotor Command with Response
The SMI host software uses these commands to implement the Motor View window and
Monitor View tools. Data that does not have direct report commands can be retrieved either of
two ways, by embedding the variable in a PRINT command, or by setting a variable equal to
the parameter and then reporting the variable. For more details, see Part 2: SmartMotor
Command Reference on page 238.
It is important to note that Combitronic reports only work if the CAN network is wired to each
motor, and the CAN addresses and baud rate are configured. Keep in mind:
l
Unique addresses must be assigned to each motor with the CADDR command.
l
All motors on the same CAN network must be configured to the same baud rate with the
CBAUD command.
Part 1: Programming: Using Data Mode