Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 110 of 909
I/O Device CAN Bus Master
For firmware version 5.x.4.30 or later, the SmartMotor can interface with standard CiA 301
CANopen devices, such as CANopen valve blocks, CANopen I/Oblocks, CANopen encoders,
and many other devices. This means through CAN and Combitronic communications, you now
have full machine control with just a SmartMotor as the bus master—no other external bus
master is required. This capability is enabled by the CAN communications commands (NMT,
SDORD and SDOWR) described previously in this section, and new/modified objects.
NOTE: This capability is currently available on Class 5 SmartMotors only.
Basic control allows 8, 16, or 32-bit sized data objects with support for both PDO and SDO
protocols. The supported profiles include but are not limited to I/O profile, encoder profile,
and DS4xx profile. This provides the ability to:
l
Dynamically map SmartMotor PDOs, map another device’s PDOs, start the NMT state
l
A SmartMotor can send/receive up to 5 PDOs each or Rx (receive) and Tx (transmit)
l
Read/write SDOs in expedited mode only, which works for up to 32-bit data
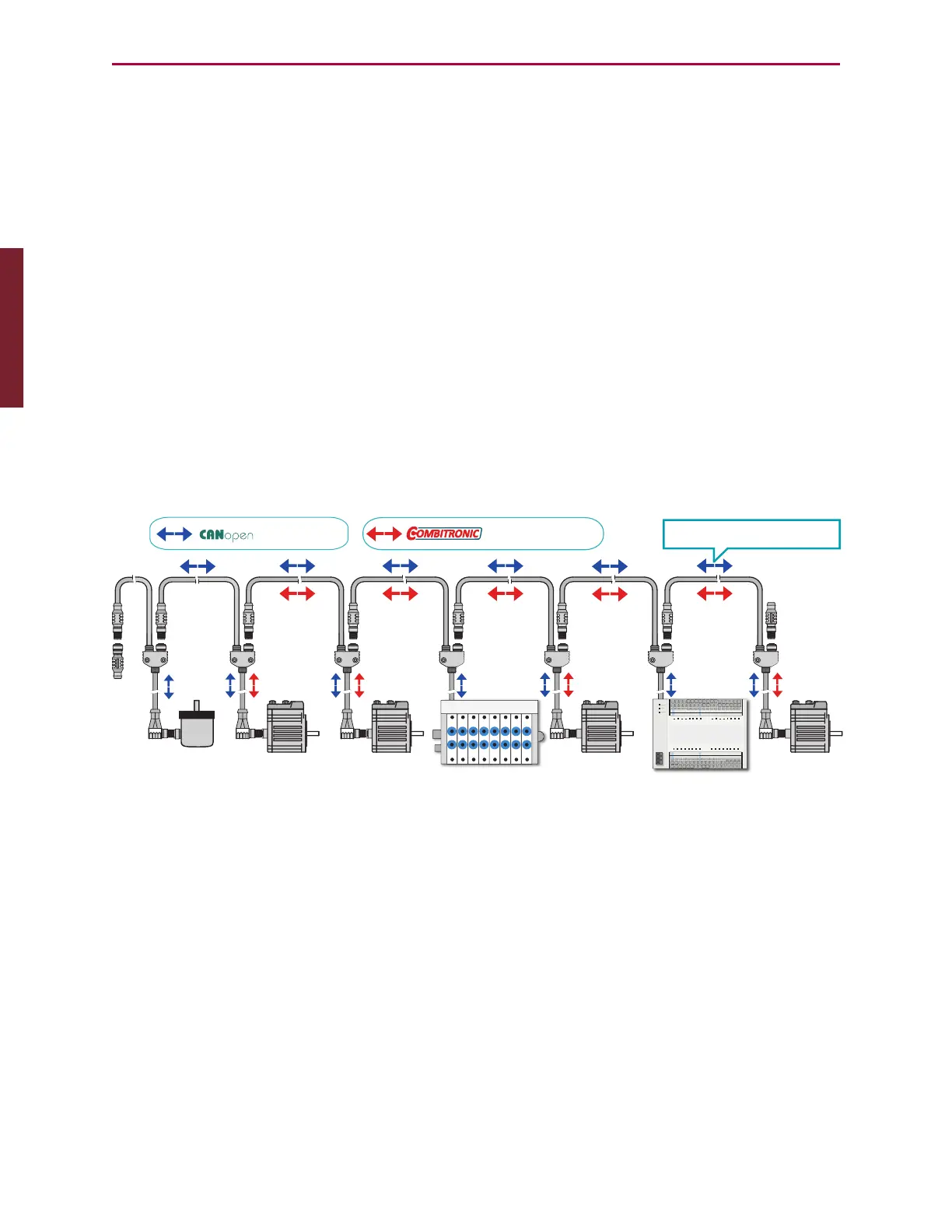
Multiple SmartMotors and multiple I/O devices may be on the same CAN bus. This combined
with Combitronic motor-to-motor communications allows for complex, multi-axis, multi-I/O-
device network control. Refer to the following figure.
CANopen
REMOTE I/O
CANopen
ABS Encoder
CANopen Valve Block
Be sure to follow proper guidelines for CAN bus cabling and termination.
Without data collision!
TM
Motor to Motor
Motor to I/O
®
SmartMotor as I/ODevice CAN Bus Master
Related CANopen objects are: 2220h, 2221h and 2204h. For more details, refer to the object
descriptions in the Object Reference chapter of the SmartMotor CANopen Guide.
Related commands are: NMT, SDORD, SDOWR, CANCTL, and B/RB. For details, see the brief
descriptions in this section and the detailed descriptions in Part 2 of this guide.
Example user programs are shown in the Part 3 of this guide:
l
CAN Bus - Timed SDOPoll on page 840
l
CAN Bus - I/OBlock with PDOPoll on page 841
Part 1: Programming: I/O Device CAN Bus Master