Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 443 of 909
ERRW
Communication Channel of Most Recent Command Error
APPLICATION: System
DESCRIPTION: Get communication channel of most recent command error
EXECUTION: Immediate
CONDITIONAL TO: N/A
LIMITATIONS: N/A
READ/REPORT: RERRW
WRITE: Read only
LANGUAGE ACCESS: Formulas and conditional testing
UNITS: N/A
RANGE OF VALUES: Output: 0-65535
TYPICAL VALUES: 0-3
DEFAULT VALUE: N/A
FIRMWARE VERSION: 5.x and later
COMBITRONIC: N/A
DETAILED DESCRIPTION:
The ERRW command reports the command source of the most recent command error.
Command errors originate from SmartMotor commands through a user program, serial port
or command encapsulation such as CANopen object 2500h. The command error bit status
word 2, bit 14 will be indicated when a new error has occurred. The ERRW command can be
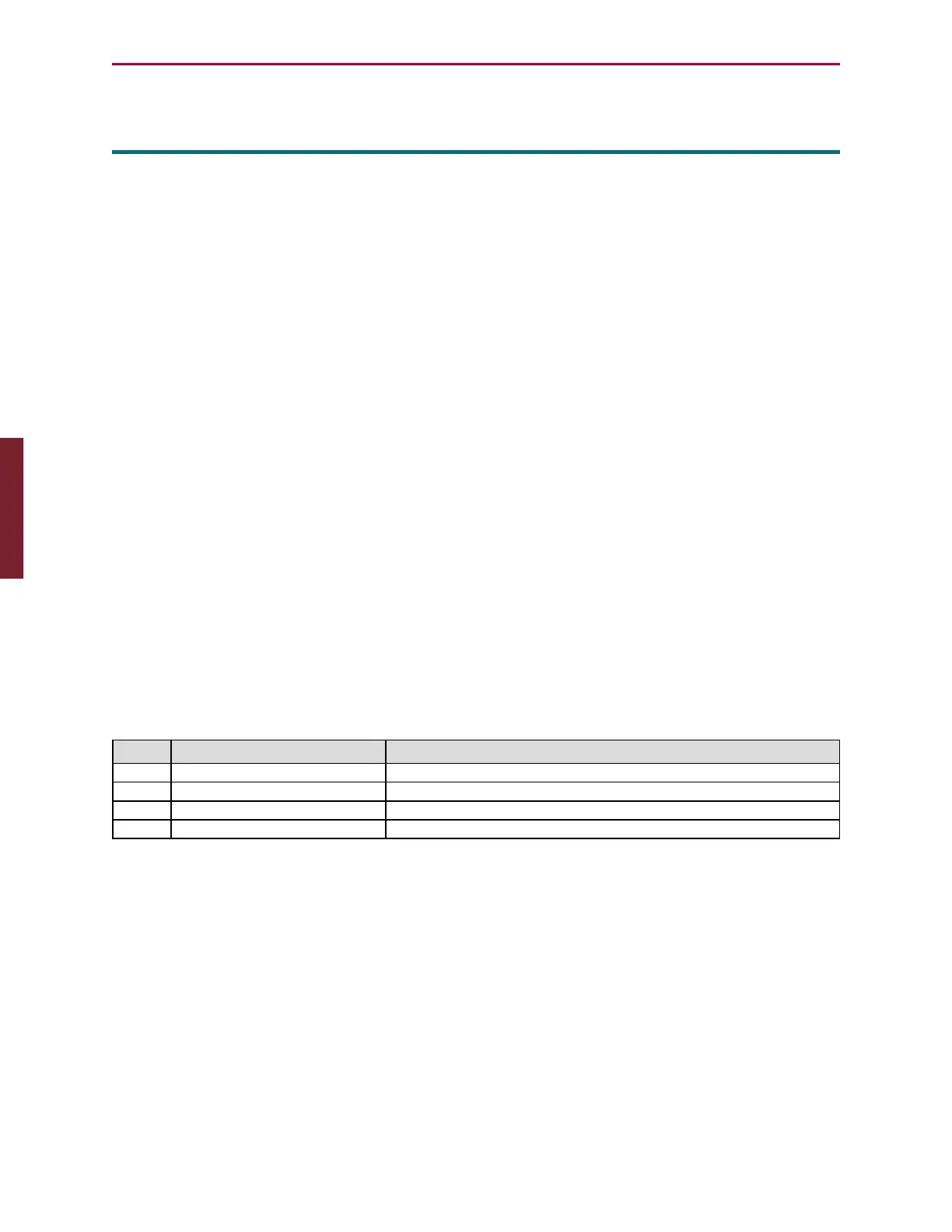
used to determine the source of the error. Refer to the following table.
Code Description Notes
0 CMD_COMM0 Communications port 0 (RS-232 for D-style, RS-485 for M-style)
1 CMD_COMM1 Communications port 1 (RS-485 for D-style only)
2 CMD_PROG From user program running in the motor
3 CMD_CAN CAN port (CANopen, DeviceNet , Combitronic) or PROFIBUS
EXAMPLE:
x=ERRW 'Assign error value to the variable x
ERRW may be used in SWITCH CASE code:
SWITCH ERRW
CASE 0 PRINT("Command Error on Com Channel 0",#13) BREAK
CASE 1 PRINT("Command Error on Com Channel 1",#13) BREAK
CASE 2 PRINT("Command Error in User Program",#13) BREAK
CASE 3 PRINT("Command Error on Network Bus",#13) BREAK
ENDS
RELATED COMMANDS:
R
ERRC Error Code, Command (see page 441)
Part 2: Commands: ERRW