Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 121 of 909
Motion Command Quick Reference
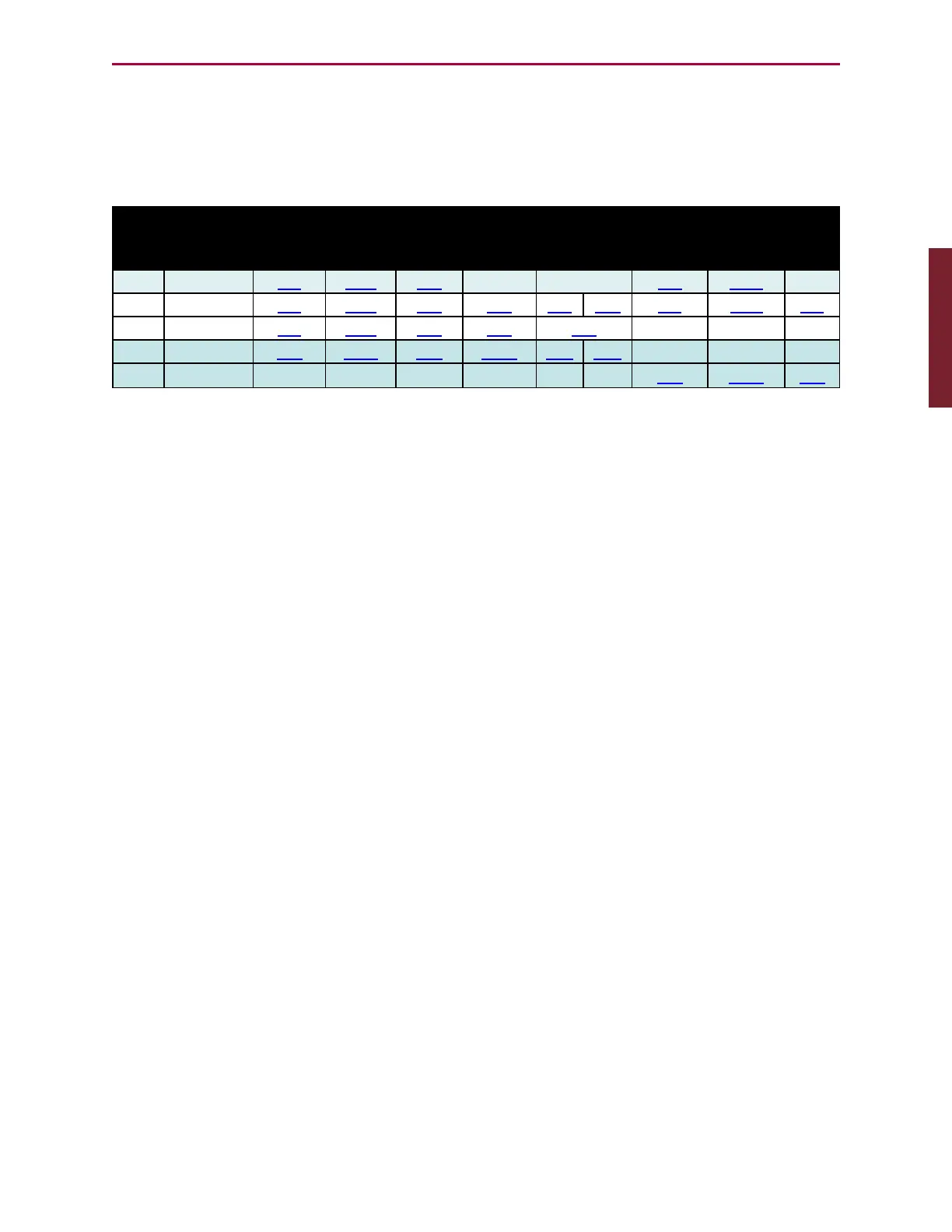
The following table provides a quick reference for the primary Class 5 motion commands. For
the complete list of motion control commands and links to their descriptions, see Motion
Control on page 903.
Absolute
Position
Relative
Position
Velocity
Accel
and
Decel
Together
Accel Decel
Following
Error
DE/Dt
Derivitive
Error
Limit
Over
Speed
Limit
Report Actual RPA RPRA RVA N/A N/A REA RDEA
Report End Target RPT RPRT RVT RAT RAT RDT REL RDEL RVL
Report Commanded RPC RPRC RVC RAC RAC
Assign End Target PT= PRT= VT= ADT= AT= DT=
Assign Command N/A N/A N/A N/A N/A N/A EL= DEL= VL=
In the chart above, you will notice Actual, End Target, and Commanded:
l
Actual: The value of the parameter as the processor sees it in real time at the shaft,
regardless of anything commanded by the trajectory generator
l
Target: The requested trajectory target to reach and/or maintain at any given time
l
Commanded: The compensated value of the trajectory generator at any time in its
attempt to reach the target
For example, in terms of the position commands:
l
Position Target (PT): The desired target position you are shooting for; what you have
specified as a target position value
l
Position Actual (PA): The current position in real time (right now), regardless of target
or where it is being told to go
l
Position Commanded (PC): The position the controller processor is actually commanding
it to go to at the time
NOTE: Any difference between Position Commanded (PC) and Position Actual (PA)
is due to following error.
There are two position types:
l
Absolute: The finite position value in reference to position zero
l
Relative: A relative distance from the present position at the time
All commands shown above are associated with both Mode Position (MP) and Mode Velocity
(MV). They may also be used in dual trajectory mode when running either of those modes on
top of gearing or camming.
All distance parameters are in encoder counts. Encoder resolution may be obtained and used
in a program through the RES command. The RRES command will report encoder resolution.
You can also use the RES command directly in math formulas.
EXAMPLE:
If you want it the axis to move to location 1234, then you would issue:
PT=1234
Part 1: Programming: Motion Command Quick Reference