Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 150 of 909
Single Trajectory Example Program
The following code provides an example of a single-trajectory traverse winding application. It
uses the commands for high/low ramps and traverse points, which were discussed previously.
For details, see Dedicated, Absolute Position, Winding Traverse Commands on page 146.
' *** User does some type of homing before this. ***
SRC(2) '*** For Demo master signal ***
'Typical applications would use SRC(1) for encoder input.
MFCTP(0,1) 'Start traverse state in "normal" direction
'Activate update of RCP(2) when servo is off
MFL(1000,1) 'Lower-end ramp
MFH(1000,1) 'Higher-end ramp
MFLTP=-1000 'Lower traverse point
MFHTP=1000 'Higher traverse point
MFMUL=1 'Ratio (default is 1)
MFDIV=1 'Ratio (default is 1)
MFSDC(4000,2) 'Dwell for 4000 counts, 2 is active traverse mode
MFR 'Enable follow mode
G 'Begin move
Chevron Wrap Example
This example uses a more complex winding method, where camming (high-frequency
oscillation) occurs on top of gearing (low-frequency traverse), to create a custom "chevron"
wrap. For electronic camming details, see CamMode (Electronic Camming) on page 153.
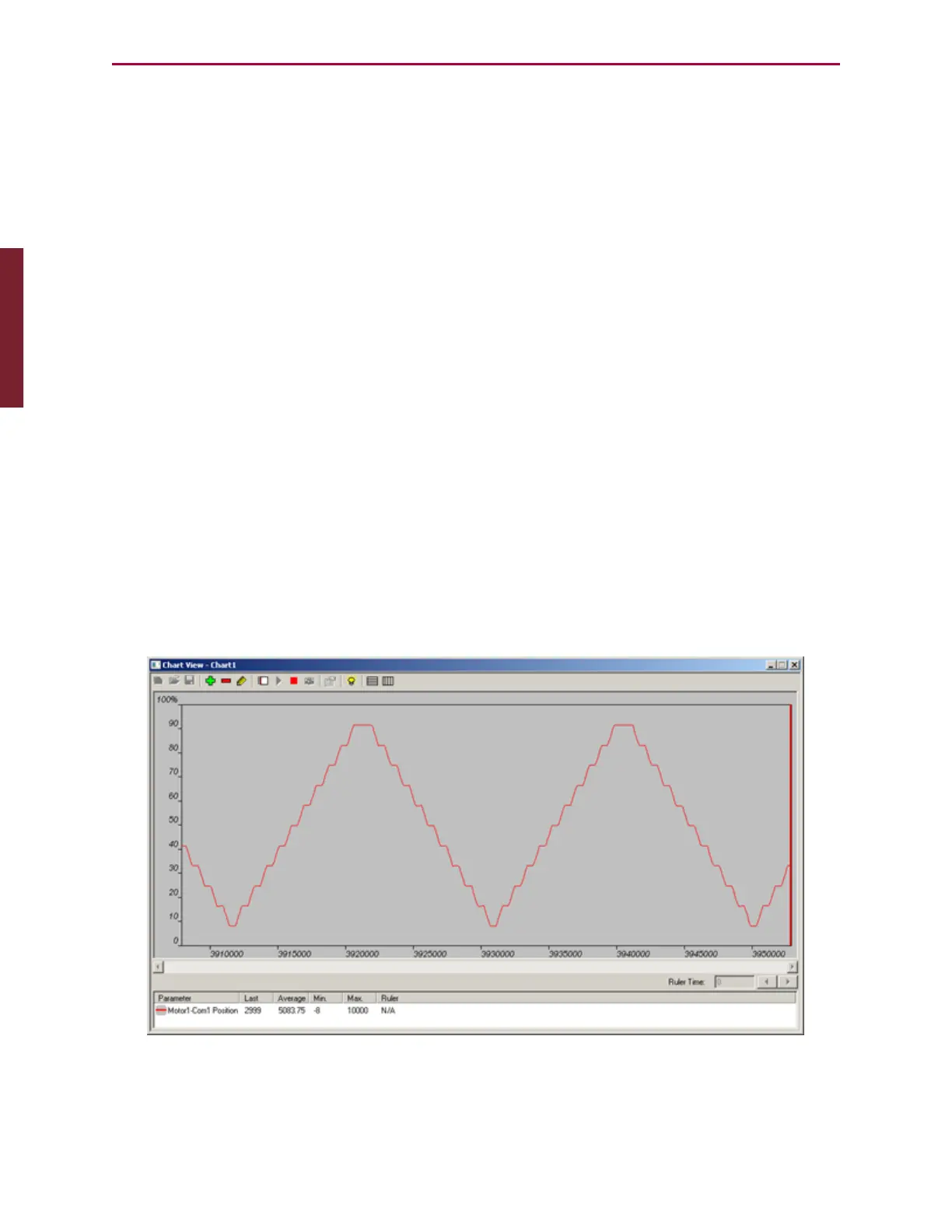
The frequency plot for this winding method is shown in the following figure.
"Chevron" Winding Frequency Plot
Part 1: Programming: Single Trajectory Example Program